
执行器的介绍
现在我们来讨论,为了使控制对象完成既定动作,如何根据传 感器得到的信号完成对执行器的控制。 为了对控制对象的运动进行良好的控制,需要知道控制对象 本身的动态特性。控制对象的动态特性用普通的微分方程式(运 动方程式)描述,控制器的设计也是根据这个方程式进行的。本章 将以空间连杆机构为对象,说明运动方程式的求法,并且以这种运 动方程式为基础,进一步讨论前馈及反馈控制问题。
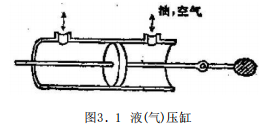
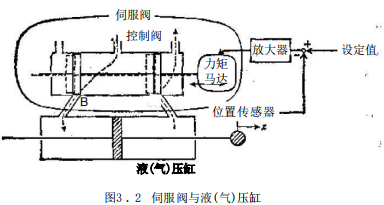
3.1 执 行 器 液压-气压执行器 图3.1所示之液(气)压缸,是利用液压或气压构成的基本执行部件。它是一种利用液(气)压源的高压油 (空气),推动活塞运动的机构。在液(气)压缸的模拟反馈控制系 统中,采用了伺服阀,由伺服阀与液(气)压缸组成的控制系统如 图3.2所示。
在模拟反馈控制系统中,传感器将液(气)压缸的活塞位置信号转变为电信号,这个电信号与设定位置的相应电信号之差构成 了力矩马达的输人电信号,力矩马达则决定了伺服阀的活塞位置. 同服阀的活塞位置往左方偏移时,油液便通过B 进入液压缸,缸内的活塞被推向右方。反之,当伺服阀的活塞位置往右方偏移时,油液便通过A进入缸内,于是活塞被推向左方。虽然就液压;气压 执行器的尺寸而言,可以获得比较大的输出力,但是却必须额外提 供液压、气压源。此外,由于液压系统的漏油,还会造成工作环境 的污染,气压执行器最然不会造成环境污染,但是由于空气的可 压缩性,会对控制造成不良影响,
直流电动机 电气执行器的优点是,因为采用的能源是电 源,所以没有管路铺设和环境污染问题。 电气执行器的基本元件 是直流电动机,其输出力矩与输入电流成正比。在直流电动机中, 因为是利用电刷向电枢中输送电流,所以容易发生故障。这在维 护时需要特别加以注意。
控制系统的组成在启动安装着直流电动机、气压缸、 液压 缸的“对象”时,通常都需要些什么样的控制设备呢?在微型 计算机 普及以前,这些设备都是用模拟电路构成的。例如,对于 图3.3所 示的例子,它要求将马达轴的转角控制到某一角度。这 时,我们可 以将与马达轴同时旋转的电位计电压,与相应于设 定角度的电位 计电压(设定值)之差值取出,然后放大若干倍, 作为马达的输人 量。(这种电路本身容易产生振荡,但是为了简 单,仍举了这个例 子.)应用模拟电路来实现两个量相减,或把某 个量放大常数倍,或 进行微分运算、积分运算等,都是比较容易 的。工程上许多情况都 可以应用这种电路组成控制设备。
如图3.3所示,如果来用微型计算机给出设定值的方法,则可 以利用既定程序控制马达的旋转角度,这种方法是当前广为采用 的一种方法。
对于机器人等情况,要求提供更加高级的控制系统的场合越 来越多。例如,当需要确定手指头的位置时,或者需要以某一速度 运动时,或者需要以某力使其推动其它物体时,凡此种种。在这些 不同的场合中,要求对不同的模型进行控制。这时,根据不同情 况,利用软件更换控制模型是比较方便的。这时的控制机构,变成 了图3.3(b) 那种形式,在大多数情况下不采用模拟反馈电路。也 就是说,用计算机完成了相当于模拟反馈电路完成的计算工作.图 3.3中给出的两个例子,分别代表了模拟反馈系统和数字反馈系统这两种不同的典型实例。当然还存在着将两者结合为一体的各种 不同的变形系统。
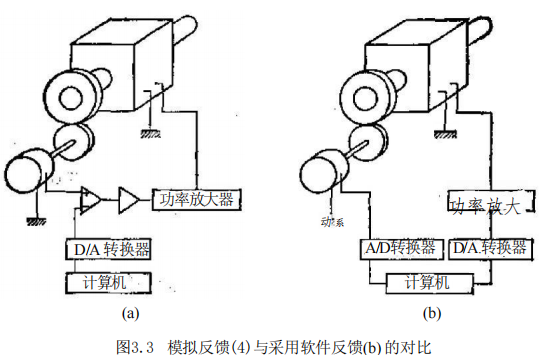
从计算机的角度考虑,在图3.3(a)的例子中,计算机不直接从 马达转动角度得到信息,马达的旋转角度由计算机确定的设定值 决定。因此,例(a) 与 例(b) 比 较 , 例(a) 中 的 计 算 机 计 算 量 小 是 例 (a) 的一大特征。
随便看看
- 2024-09-25压电式传感器测量原理
- 2024-11-01液压伺服阀
- 2024-09-14点检斗靴和侧刀板的磨耗、损伤-挖掘机点检整备篇
- 2024-11-07高原对涡轮增压器的要求
- 2024-09-14燃料系统的排气-挖掘机点检整备篇