
控制算法的介绍
动态特性的描述
在这里我们要重点研究一下控制理论,它是用计算机对机械 进行控制时的理论基础。
作为用计算机控制的机械,有操作手、人造卫星、飞机等,它们 的动态特性都是可以用微分方程来描述的。和用控制器可以直接 操作的量(操作量,控制输入),有发生在关节上的力矩,火箭发动 机的推力,机翼的形状等。显然,利用这些控制量可以控制操作手 的关节角、人造卫星的轨道、飞机的位置和姿态的期望状态:当控 制对象为机械时,上述输人-输出关系可以用微分方程式描述。不 过,描述输入与输出关系的微分方程式,只是近似地反映了系统的 动态特性。越要提高近似精度,微分方程就会变得越复杂,而且计 算时间也会越长,这样反而容易忽略问题的本质。因此,从实现满 足运动动态特性要求出发,微分方程总是具有某种近似程度的,从 而可以选择具有简单形式的微分方程式。
例如,对于图3.4所示的由两个联杆构成的简单联杆机构,试 求其运动方程式。这个例子虽然简单,却包含了后面将要讨论的 一些重要观点,因此它具有典型性。
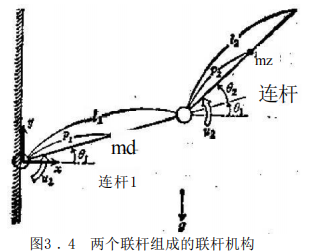
这个联杆机构,由质量为 m, 绕重心的惯性矩为 J 和长度为4(i=1,2) 的两个联杆组成,并且设它的运动被约束在垂直面内。 各关节只能作旋转运动,旋转角θ:的选取如图所示。 各个关节 上安装有执行器,当产生力矩 时,联杆便作旋转运动。因为重 心的位置(x₁,yi),(x₂,y₂) 分别为 (x₁sy₁)=(picosθ₁,prsinθ₁), (x₂,y₂)==(Icosθ₁+p₁cos(θ₁+θ₂),l sinθ₁+p₂sin(θ₁+θ₂)), 所以重心的速度为(龙,y) 一 (一pθ₁sinθ,pθ₁cosθ₁),(*,9₂) =(-L0 sinθ₁一p₂(₁+O₂)sin(θ₁+θ₂),hθ₁cosθ₁ 十 p₂(O₁+ θ₂)cos(θ₁+θ₂)). 因此,动能T 为:
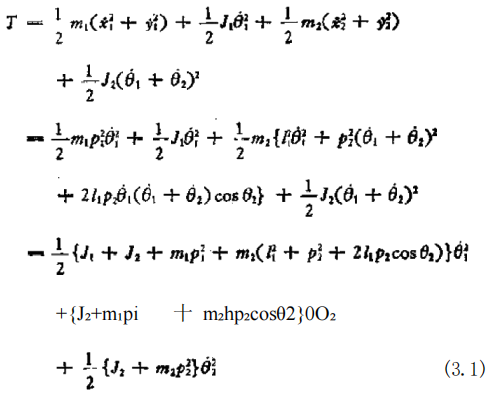
位能U为: U= 加18p₁sin θ₁十 m₂g{1 sin θ₁十 p₂sin(θ₁+θ₂)} (3.2) 由于在力矩,作用下,产生转角80,80 ₂ 时,作了功80 ₁+ M₂80₂,若设 L 一 T 一 U, 则下列拉格朗日 (Lagrange) 方程式成立:

对上式进行计算,得到
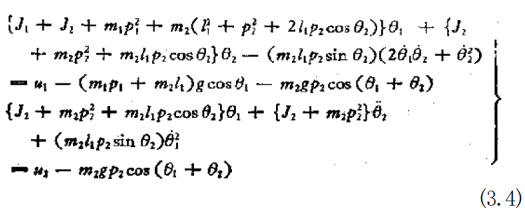
上式可以归结为下列简单表达式: w(0)θ+a(O,0)=+β(0) (3.5)
式中
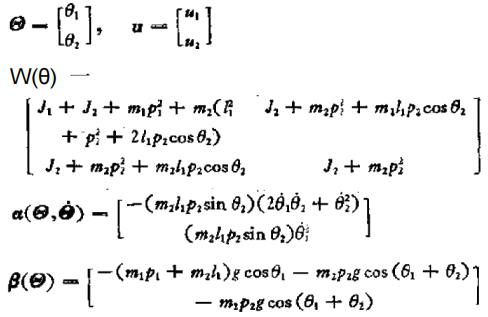
根据(3.5)式,选择0作为变量,这时的运动方程式显然是一个具 有复杂形式的非线性微分方程式。 由(3.1)式还可以清楚地看出,由于 Ow(O)0 是动能7, w(0) 为正定值,所以 w(O) 的逆矩阵通常是存在的,如果用 W(O)- 左乘(3.5)式,则得到 0——W-¹a+W-¹g+W-u 一h(θ,0,u) (3.6) 因为(3.6)式是二阶微分方程式,相对于8=[θ₁,θ₂}',若设x 一 θ,x₂=θ,x 一 θ,xq一θ₁,即设 x=[x₁z₂xjr₄], 则可以得到
下列关系式:
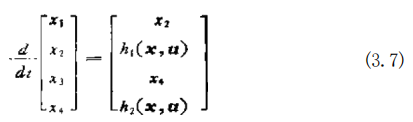
若设(3.7)式右边等于f(x,u), 则(3.7)式变为下列形式:

这和2.1.2节中的(2.20)式是相同的。 对于一般的空间联杆机构,导出的运动方程式通常都可以用 (3.8)式这种形式表示,因此,以后我们将针对(3.8)式讨论控制理 论问题,
3.2.2 控制器的设计 正如在空间联杆机构的运动方程式中看到的那样,控制对象 的动态特性,多数情况下都可以用下列非线性微分方程式表示: x 一 F(x,a),y=Cx (3.9) 现在我们来研究满足(3.9)式的系统控制问题.在未作预先声明 时,假定观测方程y=Cx 中 的 C-I, 即假定y 一 x。 这意味 着系统中的状态变量全都能够观测。 前馈控制 当要求机器人完成某种工作时,通常,机器人每 时每刻的动作都是在动作开始之前预先决定的。这称作轨迹规划 (trajectory planning)。如果规划的轨迹 x(t) 一 x*(t) 可以实现, 则必定存在 u=u*(r), 使得 x*,u* 满足(3.9)式,即必定满足 *=f(x*,u*) (3.10) x* 和 u* 是(3.9)式的解。在不存在干扰的情况下,唯有控制a* 才能够实现 x() 一 x*。因此,采用 u* 的控制叫做前馈控制。 与此对应,如果在(3.9)式中决定的女能使 x 在 x 周围稳 定,则即使存在着干扰,机器人也能在规划轨迹附近工作。 因此, 可以考虑把(3.9)式区分为在 x*,u* 上的运动和在它们周围的运动。 实际状态 x 与 x 往往是有差别的,这种差别△x 可以由 下式确定: x 一 x* 士△x (3.11) 使 △x→0 的控制输入,即使 x 趋于 x* 时的部分控制量△a 可以由下式确定: t 一 u* 十△u (3.12) 将(3.11)式及(3.12)式代入(3.9)式,可以得到 t* 十△i mf(x*十△x,a* 十△t) (3.13) 将(3.13)式按△x,Au 的一次方展开,并且分别与(3.10)式的两边 相减,然后归纳整理△ ,即 t 可 A得 (c △ (参 x (.t )式 a ) (3.14) 在(3.14)式中,如果当△x→0 时能够求得△u, 则(3.10)式 中 的a* 与 该 △u 之和为 u=u*+Aa, 据此,有 x→x*. 这 种关系可以用图3.5表示出来。根据(3.10)式求 u* 的问题,虽然原理上很简单,但是计算量很大,因此,人们研究了各种各样的快 速算法。
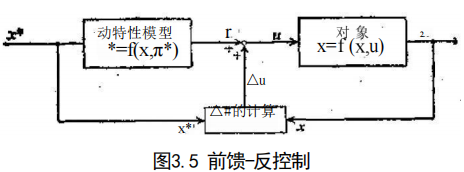
原理上很简单,但是计算量很大,因此,人们研究了各种各样的快 速算法。 此外,在满足△x→0 的情况下求△a, 也是一个困难的问 题。下面我们就来研究这个问题。因为在关于 x 的微分方程式 中,介绍的是当 x→0 时,求 u 的一般方法,所以在关于△x, △a 的微分方程式(3.14)中,希望能适当地以△x 取代 x, 以 △u 取代u,反馈控制 考虑在第二章图2.2中讨论过的例子。为了使问题简单,设 m=r=a=1. 这时水平面上的质点依据运动方 程式 一t 进行运动,当希望这个质点在 x=0 的位置停下来 时,自然需要根据现在的位置x 来决定#的值。例如,考虑设 = 一x时的情况。如果将上述v 值代人运动方程式,则得到 十 x 一 0 (3.15) 这个方程式的解,是围绕 x=0 点的简谐振动,x 在0点是不收敛 的。考虑当设 一 —x—x 时的情况。同样,如果将这个μ代入 运动方程式,则可以得到 无十x 十x=0 (3.16) → 00时,x→0. 正如上述两种情况表明的那样,根据控制对象 的状态x和 交 求x的方法,称为反馈控制,虽然这个例子属于一 种特殊情况,即根据x 和素的线性组合确定,但是它并不排除 可以是*和 x 的非线性函数。 在反馈控制中,包括能使控制对象的状态收敛到0的情况和 不能使状态收敛到0的情况。在反馈控制系统中,我们感兴趣的 是,怎样选择那些能使控制对象的状态收敛到0的系统。 线性反馈控制 选择常系数微分方程式(3.17)表示的系统 (这与第二章(2.27)式(2.28)式是相同的)作为控制对象,考虑一 般的反馈控制问题。 -Ax+Bu,y=Cx (3.17) 为了使问题简单,在上式中设 C=1, 即 设 y 一 x, 现在我们来考 虑,以 u=Fx 这种形式作为反馈控制律的控制问题。 F 称为反 馈增益。因为立是x 的线性组合,所以这种控制称作线性反馈 控制。如果将 a=Fx 代人(3.17)式,则可得到 t=(A+BF)x (3.18) 为了保证(3.18)式的解是渐近稳定的,A+BF 的特征值必须全 都具有负实部(参考2.1.2节)。因此,根据使 A+BF 达到稳定的 条件选择 F, 完全能够保证 x→0. 可是,在(3.17)式中,满足 x→0 的 = Fx 这种形式的 a 可以有很多种,从这些控制中选择哪一种,这是一个重要问题,解决这个问题的一种方法是,规定一个评价函数,然后选择一种能够 使这个评价函数取最小值的 a. 最佳线性反锁控制 给 定 1 的 函 数 x(t),x₂ (:), ·sx(t) 时,考虑泛函 x(t)=[x₁(t),x₂(t)··x(x)]'。 设 , 9 为 标 量 :

如果 x 的函数形式巳经确定,则(3.19)式的值就确定了。当 x 变化时,9的值也随之变化,使 的值达到最小的 x 可以由变 分法和(3.19)式的下列欧拉(Euler)方程式的解确定。

式 中 , 、 由x,x 的偏微分表示如下:

在(3.19)式中,如果x 和元存在着关系s(x,x)=0(s 为向量 函数),那么所需能量是多少呢?因为 s(x,x)=0 是 对 x, 的 约 束条件,所以这时的问题变成为带约束条件的(3.19)式的最小化 问题.在(3.19)式中,增加具有拉格朗日待定乘子λ= ] 的约束条件后,得到

欲求其解 x, 即为求同时满足欧拉方程式(3.22)与约束条件(3.23) 式 的x. (当然,这时可以对(3.22)式的微分进行计算后,与(3.23) 式联立求解)

在上述预备知识的基础上,现在举一个典型例子,说明怎样对 评价函数求最小值,并求出满足 x→0 的 u. 最初的例子是
(3.17)式,即对 = Ax+Bt; 以式

为评价函数,求使评价函数取最小值的 u. 公式(3.24)中的 x'Qx+w'Ra 为二次型形式, Q,R 为 常 数矩阵,当 x≠0,tt 0 时,对于 x,u, 通常满足 x'Qx>0, w'Ru>0 (正定值) ,且 Q,R 为正定矩阵。因为约束条件为 x= Ax 十 Bu, 且考虑到拉格朗日待定乘子,(3.24)式变为
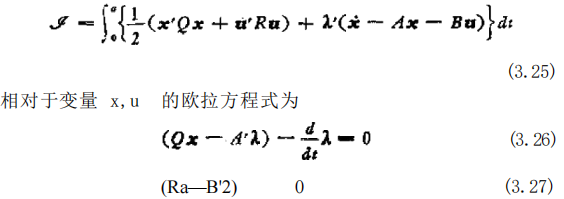
由 于R 为正定对称矩阵,所以存在逆矩阵 R-t, 根据(3.27)式,得 到 u 一 R=¹B'h, 于是根据约束条件 Ax 十Bu 和(3.26)式,并 消 去 α 后 得 到 一 Ax+BR-¹B'λ (3.28) k 一 Qx 一 A'λ (3.29) 这里,我们设联立微分方程式(3.28)和(3.29)的解具有λ= Sx(S 为常数矩阵)这种形式,如果将λ 一.Sx 代人(3.28)式和(3.29) 式,则得 =Ax 十 .BR~³B'Sx (3.30) Sx=Qx—A'Sx (3.31) 如果用S 从左边开始去乘(3.30)式,并且分别减去(3.31)式等式两端,即可消去,得到 {SA+SBR-¹B'S-Q+A'S}x—0 (3.32) 因此如果 SA 十 A'S+SBR*¹B's—Q (3.33)
成立,则满足约束条件元=Ax+Ba 和欧拉方程式(3.26), (3.27)的 x,u 便存在,(3.24)式中的 就可能取得最小值。详 细研究可以断定,在一定条件下,(3. 33)式的解S 不是唯一的,在 式 —R-1B' =R-¹B'Sx (3.34) 中,显然,能使(3.17)式稳定的 u, 的确能使(3.24)式具有最小值。 因为(3.34)式可以写成 u=Fx 这种形式,所以 R-¹B'S 是反馈 增益。方程式(3.33)*被称为黎卡提(Riccati) 方程式。 若已知控制对象的运动方程为 一 # , 评 价 函 数 为 一
试利用上面讨论的方法确定系统的,因为这 时 4 = 0 ,B=1,R=1,Q-1, 所以黎卡提方程式(3.33)变为 S²—1, 将这些值代人(3.34)式中,得到 一 土x (3.35) 在(3.35)式的解中,能使 一 稳定的1值是 一 一x, 这也正 是使 w Bang-Bang 控 制 满 足 x→0 的 a 的第二个例子,是将 评价函数从(3.24)式变化成下列形式:

式中设 0时的状态 x 为 x 一 xo, 时的状态 x 为 x -0。这时,使(3.36)式具有最小值意味着求一个 u, 使得系统能 从 x=xa 的状态以最短的时间移动到若一0这个状态。这时, 与(3.25)式对应的公式为

(3.37)式的欧拉方程式为
因此,问题变成为求解满足(3.38)式,(3.39)式和约束条件 t 一 Ax+Bu 的 x,λ,u 的问题.但是,不管怎样,欧拉方程式(3.3B) 和(3.39)都意味着没有解存在(λ=0的解无意义)。例如,设水平 面上质点的运动方程式 = u ,因而

与(3.3B)式和(3.39)式对应的公式为

其解为λ₁一₂一0.这说明,如果对控制α不加限制,使用大的 a 总能够迅速达到状态原点。与此对应,是在对 a 有限制的情况 下确定 u 值。从控制α有界的物理意义上去看,对 a 的 限 制 是合理的。 对于评价函数
(3.44)式可以看作是以不加限制的变化的 u 为参数时,h 取最小 值的条件。因此,即使在对 u 附加了限制的情况下,与(3.44)式对 应的条件仍可以认为是以 u 为参数的函数h 取最小值。如果进 行详细分析,同样可以证明这种考虑的正确性。此外,如果根据对 u 的限制,能够找到 的最小值,则 u 的限制范围也就可以找到了,
下面再次对(3 .40)式的例子进行研究。考虑在 |4<1的条 件下,(3.36)式的最短时间问题。对于 x 的欧拉方程式,约束条 件变为
此外,还必须取以“作为参数的下列函数的最小值: h=1-+λ₁(x₁ 一 x₂)+λ₂(x₂ 一 u) (3.47) 因为五为《的一次函数,所以当λ₂ >0时,函数取最小值的条件 为 # = 1 , 当 L₂<0 时,函数取最小值的条件为 x=—1. 若对(3.45)式求解,则得到λ₁=c,λ₂=—ct 十 d(c,d 为 常 数)。所以,可以看出,“是随21符号的变化而最多改变一次符号 的函数。对于 =1, u —1 时的状态点(x₁,x₂), 由 一 x₂, 一 士 1 中 消 去 dr, 得 到 dx₁/dx₂= 土xz, 如果再对此式积分,则 显然得到#1千x2/2=const 的动点轨迹。图3.6表示了这个曲线族。
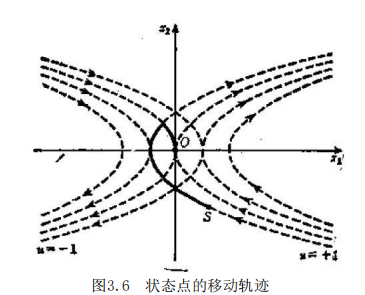
从《最多只改变一次符号和图3.6可以得知,由任意初始状 态 S 以最短时间往O 移动的控制,显然应如图3.6上的粗实线所 示。这样,只使用x 的界限值 一 士1就能够实现最短时间控制,这的确是一件使人很感兴趣的事情。这种控制就称为 Bang-Bang 控制。
随便看看
- 2024-10-11外啮合中高压齿轮泵
- 2024-09-19直列柱塞泵-液压传动基础知识
- 2024-10-10柴油机喷油器常见故障与维修
- 2024-09-14点检下部行走体的机油泄漏、磨耗-挖掘机点检整备篇
- 2024-09-14点检各油缸、配管、软管类的漏油和损伤-挖掘机点检整备篇