
L290/L291/L292三芯片直流电动机速度和位置伺服控制
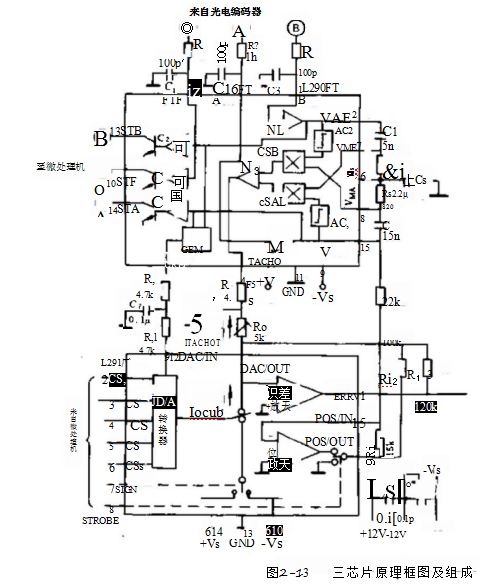
L290/L291/L292三种专用集成电路是SGS公司为直流电动机控制而设计的。它们与一台带光电编码器的微型直流伺服电动机可组成一个由微处理器或微机(MCU)控制的位置伺服系统,见图2-13。它们也可以单独使用,例如由L291、L292构成一个直流电动机速度控制系统。
1.L290转速/电压转换器L290是16脚的塑料封装单片大规模集成电路(LSI),它完成下列三个功能:
·F/V变换器产生测速电压·基准电压发生器
·位置脉冲发生器
使用电源电压为±10~15V,从光电编码器来的输入信号FTA、FTB、FTF的峰值为±7V。
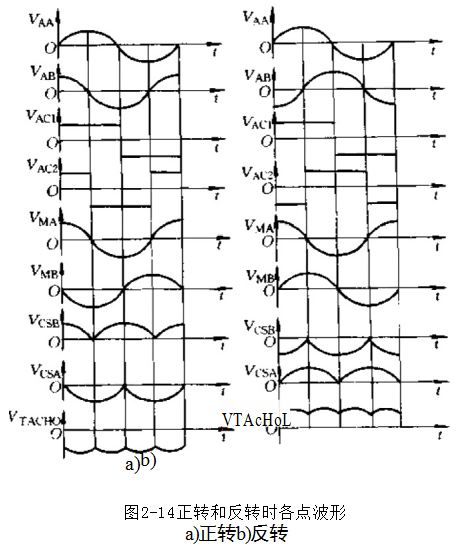
对测速电压(TACHO)的产生说明如下。光电编码器的输出信号中,FTA和FTB是两路正交的正弦信号,而FTF是每转1个脉冲的信号。FTA和FTB由放大器N,和N₂放大后产生VAA和VAB,经外接RC网络微分,信号VMA和VMB与原信号间有相移,且幅值与电动机转速成正比。它们分别送至两个乘法器的输入端。两个乘法器的另一输入端分别为VAC₁和VAcz,它们是由VAB和VAA经比较器后得到的。两个乘法器输出在运算放大器N₃中求和而获得测速信号TACHO,完成了F/V变换器的功能。图2-14表示了在正转和反转时各点波形。
L290还将STA、STB、STF三个方波脉冲信号送给MCU。STA和STB供位置跟踪用,STF供系统初始化用,以确定绝对位置的原点。
L290还为L291产生一个基准电压,此基准电压为VREF=|VAA|+|VABl
由于测速电压也是由VAA和VRB产生的,因此系统有自补偿功
能,使输入电平波动、温度变化和元器件老化对系统性能的影响减小。
2.1291D/A转换器和误差放大器L291是16脚塑料封装LSI电路,主要组成部分是5bit的D/A转换器,还有误差放大器和位置放大器。使用电源电压为±10~15V。
5bit的D/A转换器接收从MCU来的二进制数码,参考电压取自L290,产生双极性输出电流,其极性由输入的SIGN决定。最
大输出电流为
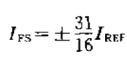
式中IREF—-基准电流。
该D/A转换器最大线性误差为±1/2LSB,即最大输出的±1.6%。输入数码与输出电流I。的转换关系见表2-2。从MCU来的速度指令信号经D/A转换器转换为模拟量,再与从L290来的测速信号在误差放大器(速度调节器)比较,产生电动机的驱动信号ERRV,送至L292。速度调节器的参数可由外接电阻整定,为了得到良好的稳定性,速度调节器闭环增益应等于或大于20dB。用7脚从MCU接收SIGN信号来控制电动机的转向。
表2-2D/A转换表(低电平有效)
输入数码 | 输出电流 I。 | |||||
SIGN | SC5(MSB) | SC4 | SC3 | SC2 | SC1(LSB) | |
L | L | L | L | L | ·L |
|
L | H | H | H | H | H |
|
× | H | H | H | H | H | 0 |
H | H | H | H | H | L |
|
H | L | L | L | L | L |
|
设置的位置放大器使位置增益可单独调整,并且由8脚的STROBE信号决定系统的工作方式。当此信号为低电平时,位置放大器输出接至16脚,系统工作于位置闭环工作方式;若此信号为高电平,则为位置开环方式,即仅速度闭环控制,此时16脚接地。
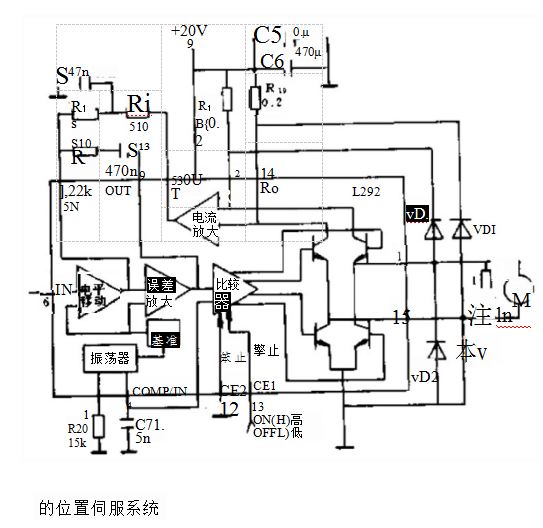
3.L292开关式直流电动机驱动器L292是15脚塑封的智能功率集成电路,其内部有一个功率跨导放大器,组成PWM电流环,向直流电动机提供双向的电枢电流与输入(6脚)的ERRv信号成正比。其特点是
·使用单电源(18~36V)
·驱动能力为2A、36V、1~30kHzPWM
·两个逻辑使能端
·外接环路增益调节
·有过载保护和电源欠电压保护
L292设置有电流检测(由R₁8、R₁₉用作电流检测电阻)和电流调节器。反馈滤波器和电流调节器的参数可从外部调整,实现电流闭环调节。内部设有电平移动电路,使电路在单电源下工作,可实现电动机正反转运行。输出级为H型桥式,为了避免两桥臂出现同时导通的危险,实际上末级有两个比较器,构成窗口比较器,接受控制电压和振荡器三角波信号,两个比较器输出的PWM信号有一定的时延。该时延r的大小由10脚外接电容器C₁7和内部内阻的RC乘积决定。如图2-13,C:≈15nF,Rr≈1.5kΩ,则t≈2.25μs。当使用多个L292驱动多台直流电动机同步运行时,此RC网络应有正确接法;以避免产生开关噪声及互调问题。
L292还具有输出级封锁功能,利用12和13脚不同组合来封锁输出。仅12脚为低电平、13脚为高电平时,系统才能正常工作,其余组合状态均为封锁。
4.L290、L291和L292组成的直流位置伺服系统如图2-13所示,在此位置伺服系统中,与直流伺服电动机共轴一台光电编码器输出在L290产生测速反馈信号(4脚)和位置反馈信号(15脚),送给L291,并产生位移-方向信号,送给MCU。MCU运算决定每个运动的最佳速度曲线,以合适的指令控制L291。在该系统中,MCU与L290、L291的连接线是10条I/0线:7条输出和3条输入。给L291的是5bit速度指令数码、SIGN(设置转向)和速度/位置工作方式选择信号STROBE,从L290来的三条输入线是STA、STB、STF。
为了跟踪电动机位置,MCU以STA计数,测量实际的位移量,并以STA和STB之间的相位关系来判别方向。常用方法是以STA作为中断输入,1个中断服务程序将STB采样,由相位差决定计数是加还是减。
对于每一个运动,MCC计算出位移,确定正确方向。系统起
动时,首先工作于位置开环(速度闭环)控制方式。MCU向L291发出最高速度的指令码(若位移指令的距离很短,设定的速度可能要低一些),电动机以最高允许峰值电流起动,使电动机加速至设定转速。借助STA中断服务程序,逐步接近目标。然后逐步减小速度指令码,电动机制动。最后L291进入位置闭环控制方式、实现精确定位。图2-15给出此过程的转速和电流变化。
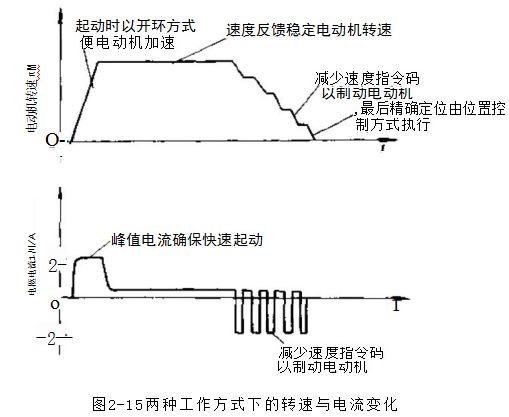
图2-13所示系统使用的电动机参数是:额定电压为18V,最高工作电流为2A,电枢电阻为5.4Ω,电感为5.5mH,空载转速为3800r/min,反电动势系数为4.5mV/(r/min)。光电编码器条纹数为200。PWM频率为
表2-3给出这个实例的外接元件推荐值,并解释它们在系统中的作用以及数值增大或减小时对系统性能的影响。
表2-3外接元件选择和对系统的影响
元件 | 推荐值 | 作用 | 大于推荐值时的影响 | 小干推荐值时的影响 |
Rl,Rz,R | 1kΩ | 滤除编码器噪声 | 使UAA、UAB偏移电压增加 | |
R.,R₅ | 8200 | 微分网络 | 转速偏移和转速信号增加 | 转速偏移增加,转速信号减小 |
R₆,R₇ | 4.7kQ | D/A转换器输入电流的设定 | 输入电流增加 | 减小 |
R₈ | 4.7kΩ | 设定电动机转速 | 增加 | 减小 |
R₉ | SkΩ | 调节转速 | 当R,<<Ri₃/10时,有可能振荡 | |
R₁.R₁2 | 22kΩ100k0 | 设定位置环增益 | 降低 | 增加 |
R1₃ | 120kΩ | 设定速度环增益 | 增加 | 降低 |
R₁ | 15kΩ | 设定位量环增益 | 增加 | 降低 |
Rs,R₁6 |
5100 |
反馍电流滤波 |
当Rs+R1₆≤3.3kQ时,电流检测放大器输出有饱和的可能 | |
R₁+ |
22kΩ | 设定误差放大器增益 | 高频增益增加,Rr>5.6kΩ时有振荡的可能 | |
R₁g,R₁9 | 0.20 | L292跨导率设定 | 减小 | 增加 |
R₂o | 15kQ | 设定PWM频率 | 降低 | 增加 |
R21 | 330 | 补偿网络 | ||
C,Cz,C₃ | 100pF | 滤去编码器噪声 | 频带变难 | 变宽 |
C₄,C | 15pF | 微分网络 | TACHO信号增加 | 减小 |
Cs | 2.2μF | 旁路电容 | 增大偏压建立时间 | 降低对低频的旁路作用 |
C, |
0.1μF | 对D/A转换器输入电流低通滤波 | 低速时电流纹波增加 | |
CB |
0.22μF | 对TACHO信号的低通滤波 |
速度环频带变窄 | 低速滤波效应降低、使系统噪声增大 |
元件 | 推荐值 | 作用 | 大于推荐值 时的影响 | 小于推荐值时的影响 |
C10,Cn | 0.1μF | 电源旁路 | 有振荡可能 | |
C12 | 47nF | 反馈电流滤波 | 阻尼系数降低,有可能振荡 | 阻尼系数增大 |
C13 |
47nF | 取C₃R=L/R。取消电流环极点 | ||
C15 | 0.1]μF | 电源旁路 | 有振荡可能 | |
C16 | 470μF | 电源旁路 | 纹波电压增加 | |
C₇ |
1.5nF | 设定振荡频率和输出晶体管死区 | 频率降低死区增大 | 频率增加死区减小 |
C1g | 1nF | 补偿网络 | 有可能振荡 |
5.L292在直流电动机速度控制中的应用L292是单片功率集成电路,其功能如同一个跨导放大器,H桥输出负载电流与输入端(6脚)的信号电压成正比。下面是在直流电动机速度控制中应用的例子。
(1)直流电压控制的速度控制系统:该系统见图2-16,这里用一台直流测速发电机(TG)作速度反馈。它的电压常数是Kg。输入的控制电压V;从电位器RP₁得到。由它的极性控制电动机转向。在±10V供电的误差放大器中,有下列关系:
的输出V。作为L292输入,设Gm为L292的跨导率,典型值Gm
=220mA/V,即

由输入电压Vi与电动机负载电流I的关系可得到
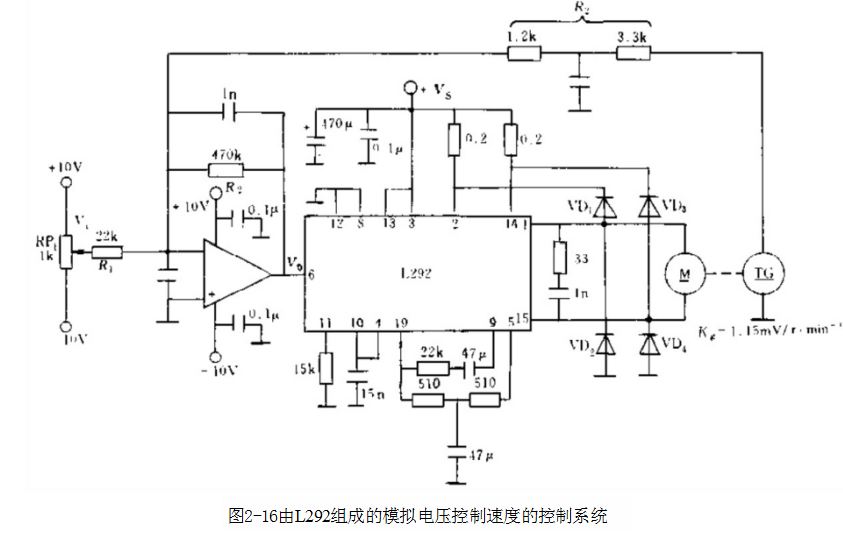
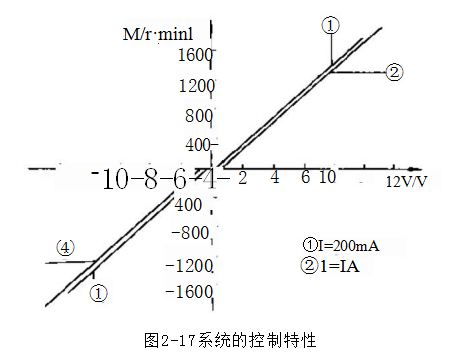
从该电路控制特性图(见图2-17)可以看出,有控制死区的存在。曲线1表示轻载200mA,曲线2表示1A时的输入电压V,与转速nM的关系图,死区的大小随电流增加而增大。从上式可见,在这个有差调节系统中,增大增益(如增大R₃),有利于减小死区,减小负载对转速的影响。
另一个改进的方案是将电流反馈信号以误差放大器求和点引入,增加一个电流反馈环。此方案见图2-18.L292电路中,与电动机平均电流成正比的电流在5脚和7脚之间的外电路流过,如图2-18所示,从5102电阻上采样经一运算放大器放大调节后,送
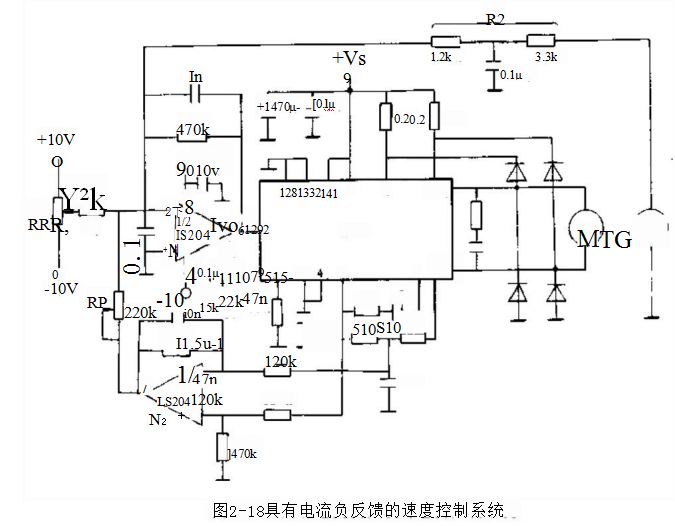
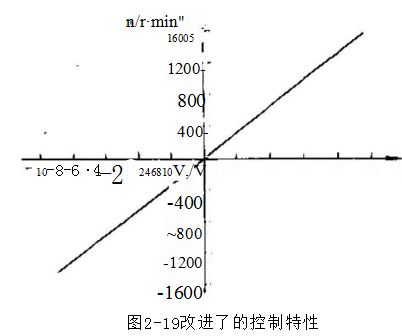
至误差放大器的2脚。反馈系数由电位器RP₂整定。适当调节RP₂,可抑制负载电流对转速的影响。从图2-19可见,该电路的控制特性在2A电流内都是一条通过原点的直线。
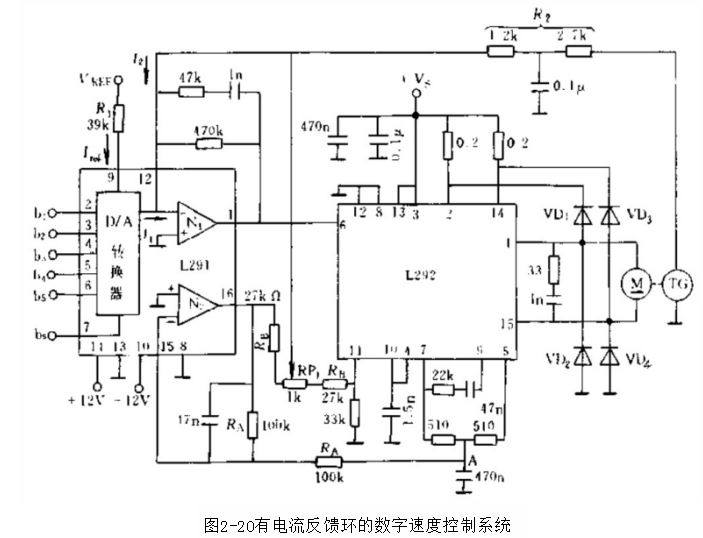
(2)由L291、L292组成的数字控制的速度系统:该系统电路图见图2-20。在这个例子里,数字速度指令是二进制数码,从L291输入。测速发电机输出电压从12脚输入,N₁为误差放大器。由7脚逻辑电平决定电动机转向。利用L291内部放大器N₂引入电流反馈。与上例稍有不同,由于N₂只有反相输入端可以使用,故电路稍为复杂一点。电流反馈信号从电位器RP,滑动触头取得。调整方法是这样的,让给定零速数码(b,~b₅均为1)输入,调节电位器RP,使电动机转速为零。
6.L292驱动功率的扩大L292PWM驱动器最大驱动能力为36V、2A,可用于约60W以下低压直流电动机的控制。在机器人、机床进给系统等大功率系统中应用时,可外接较大功率的晶体管,以扩展其驱动功率。
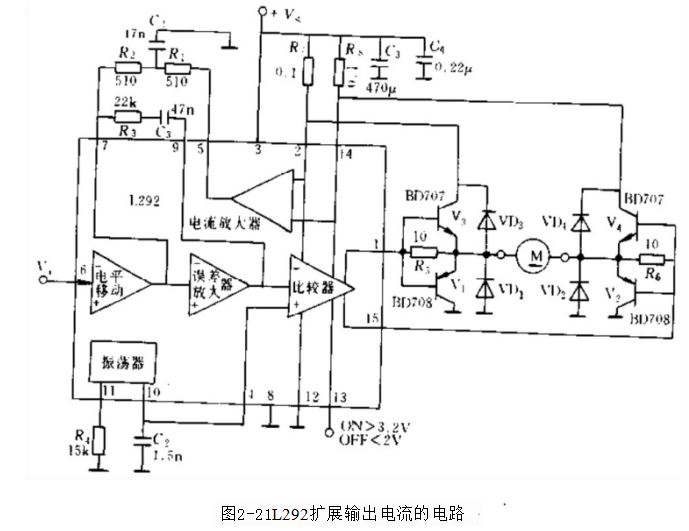
对于电压为36V以下,仅扩大驱动电流到4A的电路,见图2-21。表2-4给出要求输出电流为4、6、8A时,应选择的功率晶体管和续流二极管、取样电阻(R₇、Rg)的推荐数据。
另一个功率扩展的示例是图2-22所示的150V、50A驱动能力的电路。L292输出经两个变压器去控制外接H桥电路,变压器
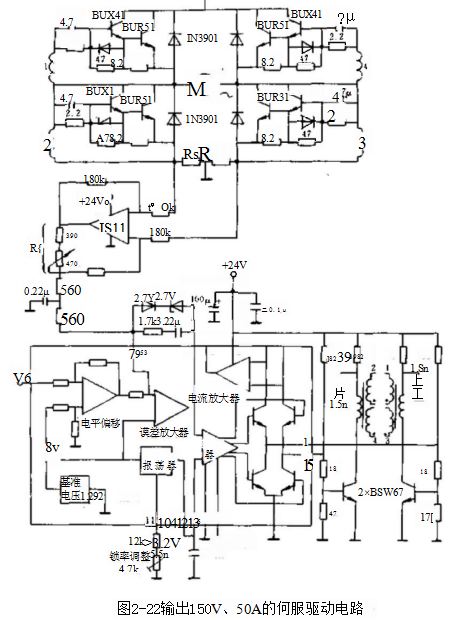
的电压比为1:20。跨接在7脚与9脚之间的两个稳压二极管用来限制变压器的占空比(15%~85%)。LS141运算放大器向L292提供电流反馈。两个电流取样电阻是R、R₅2。电动机负载电流I与6脚输入电压V;的关系是

这里,R=R₄=R₃₂=12×10-³Ω。当R的值是390~8600变化时,该电路的跨导率I/V,是3.0~8.6A/V。
表2-4推荐的电路数据
输出电流/A | 指令电压V;/V | 取样电阻/m | 功率晶体管 | 续流二极管电流 (快速二极管) | |
V₁、V₂ | V、V | ||||
4 | 9.1 | 100 | BD708 | BD707 | 2A |
6 | 9.1 | 65 | BD908 | BD907 | 3A |
8 | 9.1 | 50 | BDW52A | BDW51A | 4A |
随便看看
- 2024-10-21工程机械柴油机废气颜色的分析与故障诊断
- 2024-11-19液压泵快速电刷镀
- 2024-11-07车用柴油机的废气涡轮增压器
- 2024-09-18故障原因和对策-挖掘机换装及注意事项
- 2024-09-18基尔霍夫定律-电路基础知识