
SG1731直流电动机PWM控制器
SILICONGENERAL公司的SG1731是直流电动机PWM控制单片集成电路。它以输入误差信号幅值和极性控制输出两路脉宽调制信号,控制H桥输出,实现直流电动机的四象限控制,可用于精确位置伺服控制和速度控制。
1.特点
·宽的工作电压范围,驱动电源V。为±2.5~±22V,控制电路Vs为士3.5~±15V,也可用单电源工作·H桥输出,双向电流为100mA
·调制频率可调范围为10Hz~350kHz
·误差放大器高转换速率,典型值为15V/μus,单位增益带宽1MHz
·死区可调节·有关断控制
该芯片采用16脚DIP封装。按照工作温度范围分为三种不同型号:
SG1731
SG2731
SG3731
2.各部分说明
—55~+125℃25~+85℃
0~+70℃
由图2-23的原理框图可知,SG1731内部包括下列各部分:三角波振荡器、误差电压放大器、脉宽调制器、H桥驱动输出,现分述如下。
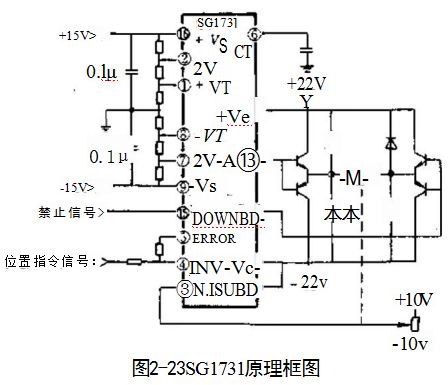
(1)三角波振荡器:它由两个电压比较器、一个RS触发器、一个双向500μA恒流源和外接定时电容C(接6脚)组成。一个正基准电压(2V+)施加至2脚,负基准电压(2V-)施加到7脚上,它们决定了三角波的峰值和谷值电压。在正常情况下,正负基准电压相等,使波形对称。由于定时电容充电和放电均以500μA恒流源进行,故三角波的两个斜坡也是完全对称的。
如果用△V表示基准电压峰-峰值,即△V=2VA+-2V-。可取△V=1~10V。三角波振荡周期Tosc(s)与定时电容Cr(F)关系如下式:
(2)误差放大器:它是一个有内补偿的低输出阻抗运算放大器。它的输出和输入端均有引脚引出,用户可方便地使用常用的反馈补偿技术,以控制闭环系统的增益特性。
(3)脉宽调制器:从RS触发器输出的三角波信号与误差放大器输出的误差电压相加,并衰减一半后在两个比较器与门槛电压+VT和一VT进行比较,从而得到两路PWM信号,控制两个半桥的输出OUTPUTA(13脚)和输出OUTPUTB(12脚)。门槛电压分别从1和8脚输入。
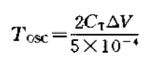
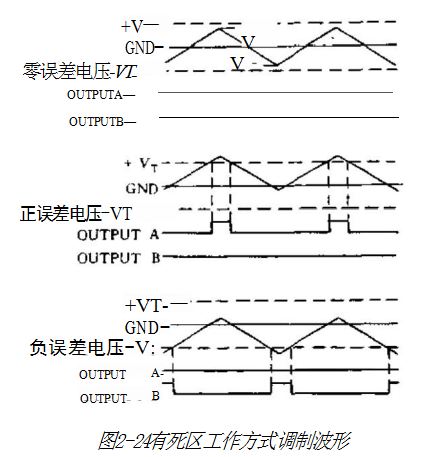
脉宽调制可分为有死区和无死区两种工作方式,它们表示在脉宽调制波形图2-24和图2-25中。
当+VT>Va+时为有死区工作方式。当误差电压为零时,三角波与门槛电压没有交叉点,输出A和B保持低电平。当误差电压足够正时,三角波向上平移与门槛电压线周期性地相交,输出OUT-PUTA有PWM输出。此脉冲占空比与误差电压有正比关系,直至100%占空比。同样在负误差电压下,输出OUTPUTB被调制。
当+VT<V+时为无死区工作方式。当误差电压为零时,三角波与门槛电压线有交叉,在输出OUTPUTA和输出OUTPUTB出现两列相互相差为180°的激励脉冲,有利于消除系统的机械死区,故把此种工作方式称为无死区工作方式。
(4)输出驱动级:两路输出驱动级为推挽结构半桥驱动,输出和吸入电流为100mA,最大值为200mA,四个二极管起钳位和续流作用。采用非饱和、准补偿技术,输入级为高压施密特触发器电路,正反馈加速了开关时间。
此外,15脚用作关断控制,当接低电平时,输出级瞬时强制为高阻态,可用于系统保护。
典型应用例子
(1)在位置伺服中的应用:如图2-26所示,控制电源为±15V,驱动级电源为±22V。外接H桥晶体管开关,以扩大输出电流。电动机经齿轮传动带动一电位器作为实际位置检测,反馈电压从3脚引入。位置指令电压信号从4脚输入。用六个电阻分压得到三角波峰值电压和门槛电压值。
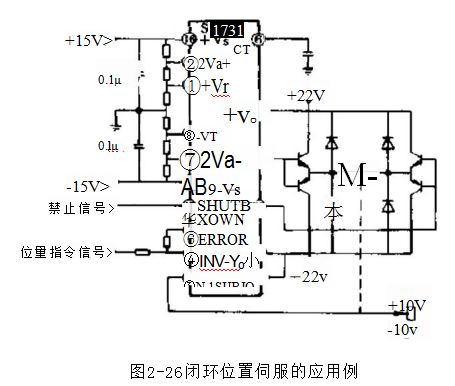
(2)在速度控制中的应用:图2-26的电位器用测速发电机代替,即可构成速度控制系统。
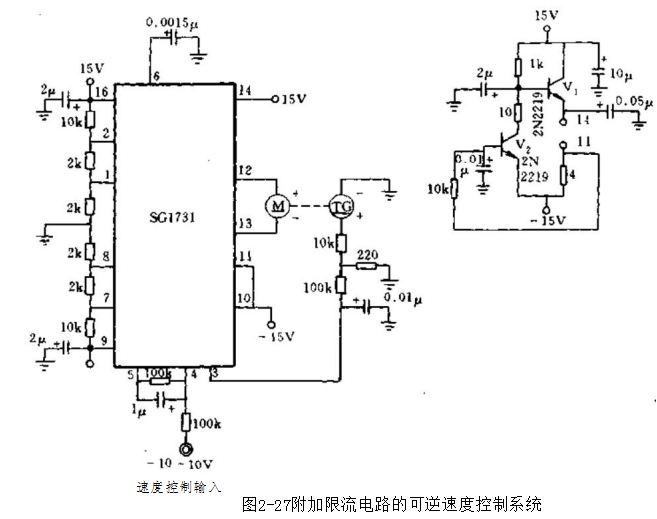
图2-27所示的例子是由SG1731的12、13脚直接驱动微型直流电动机的可逆速度控制电路。测速发电机信号经衰减网络、RC低通滤波器接至误差放大器同相输入端3脚。右边电路是考虑到增加限流保护而增设的。芯片的14脚和10、11脚原先分别接电源±15V,现分别接至该电路的两指定点上。当电动机突然反转时,出现过电流,由取样电阻4Ω产生电压信号控制两个晶体管状态,实现了限流,以保护芯片。电流超过200~250mA时,电路被关断。
随便看看
- 2024-09-14每250小时的整备-挖掘机点检整备篇
- 2024-10-30压力反馈调速器的分析
- 2024-11-11涡轮增压器的匹配
- 2024-09-14长期保管时的注意事项-挖掘机点检整备篇
- 2024-11-12正确选择使用液压油、确保液压油和液压系统的清洁