
压力反馈调速器的分析
对于压力反馈调速器元件的名称,可参考图4-8a。
这是一个用来表示工作原理的小信号分析装置,为了仔 细分析这一装置,从三个单独的部分进行分析。即:
基本调速器
飞块弹簧质量系统 弹簧驱动器
此外,采用了一些简化假设,即
(a) 摩擦力的影响忽略不计,
(b) 液压油的可压缩性忽略不计,
(c) 小孔特性被线性化(对于微量变化)。
(d) 导向阀的滑移力可忽略不计。
下面分别讲基本调速器和阻尼调速器的运动方程式。 (a) 基本调速器
在导向阀匕,力的平衡与简单机械调速器相同,只不过 在导向阀底面积五上附加了反馈压力pr, 于 是 导 向 阀 上 力 的平衡为:
飞块力Fw+ 反 馈 力Ff= 弹 簧 力F (19)
将飞块弹簧质量系统的粘滞摩擦和质量一加速效应暂时 撇开,则
Fw=mo!2·q/p ·r
式 中o% 为发动机转速① 。在松弛耦合的条件下由弹性 驱动的飞块系统的转速。其反馈力Ff 为 :
Ff=hPf
在现代调速器中,调速弹簧的绕制,要使它的力和压缩 距离之间有平方关系,从而与飞块的转速和离心力之间的平 方关系相匹配 。于是在整个转速范围内获得恒定的灵敏度 。 这样在整个工作范围内的弹簧力为:
F=K(X-α)²
同样由于比例反馈,给定速度随调速弹簧输出值y 而 变 更,即:
X=K w₁-φy
式 中Ki0i 为给定速度, φ为反馈系数, 由此可得: F 。=K(Ki①; 一φy-x)²
现在假定参数条件有微小的变动,并且使用算子D , 则
飞块力变为:
8Fw=Kδ06-R8x (20)
R=m(0%q/p)²
可见与机械调速器一萍 。反馈力
δFf=δp
8Fs=β(K,80,-ψ8y-8x) 式中: β=2K(Ki0;-φ?-x),度。(21)
为作用点上的弹簧刚
当给定速度为但定时,8co;=0 弹 簧 力 8Fg 为:
8Fg=-β(φδy+δx) (22) 将式(20)(21)和(22)代入力的平衡方程式(19)得出:
K,δo+(β-R)8x+hδpr+8φδy=0 (23)
动力活塞的运动,可以从简单的流量一位移关系式(13)
求得:

于是反馈流量平衡式为:
式中:K₄—— 线性化节流小孔系数。 在补偿活塞上力的平衡为

对于微量变化,关系式(25)变为:
消去 δx , δpf 并重新整理得到
若 φ ≠0(降速)
若 φ = 0 ( 同 步 )
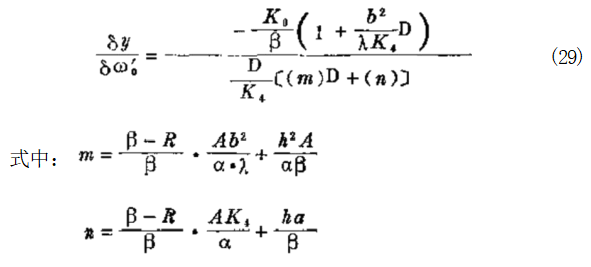
应注意的是: 降速调速器基本上是同阻尼的二阶响应和 在分子中的稳定相位超前项成适当比例, 由于1/D 项 的 原 因,同步调速器基本上是一个积分调节器。
液力反馈通路中的可调节流阀,实际上起变更K4 值 的 作用。关闭节流阀,K4 值降低,从而增大积分时间常数和 增大相位超前时间常数,这样来减慢和稳定其响应。
在降速情况下,稳态增益为:
如果加以归一化,使用参考值y 和 o%, 使上式变为无 因次式

这是一个无因次的增益,它等于速度降的倒数,于是

例如对于4%的速度降 ,增益K₀o%/βφy=25
这些方程描述了基本调速器的作用。然而在调速器内,
有两个重要因素干扰着整个响应,飞铁弹簧一质量系统及弹 簧驱动器。
为了论述清楚,我们稍作变更,并假设上述两类元件可 以分开叙述,则对于飞铁系统,可以应用一个二阶动态阻尼 项,简化增益式为:
式中: p 。——飞铁克服与调速弹簧作用力的自然振荡频率,
典型为25Hz;
t ——导向阀等的运动粘滞阻尼系数,包括节流小孔 系数Kg 在反馈中对导向的影响。
另外 ,弹簧驱动器包括一套飞铁和托架等组成的惯性 体,这套惯性体通过弹簧耦联到驱动轴上。弹簧驱动器的运 动件之间有粘滞阻尼 ,很容易推导出这类装置的传递函数 为:
式中:o,—— 调速器的实际输入速度;
①n——转动头与弹簧驱动器的自然振动频率;
v—-- 弹簧驱动器中的粘滞阻尼系数。
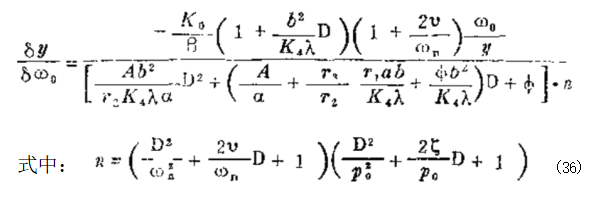
于是在降速工作情况下,调速器的总传递函数为:
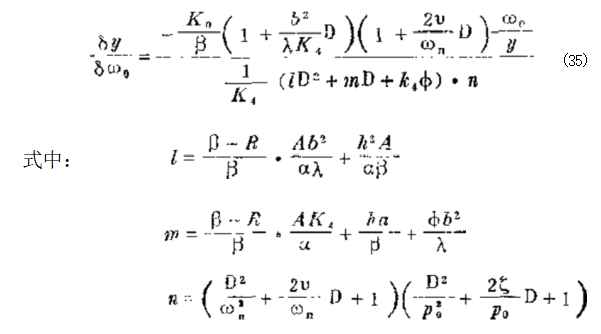
式中: φ ——速度降(可调)变动;
K ₄— 稳定性与晌应(可调)变动; λ——弹簧变化。
变动①n可以使调速器与发动机相匹配。 (b) 阻尼调速器
对于阻尼调速器,参看图4-3(b) 中各参数可写出与基本 调速器相似的方程式:
可以看出,这是一个稍为复杂的表达式,式中 K₄ 和 r₁ 为调节参数,它们对稳定性和响应有类似的影响,而参数φ
为可调速度降。
两种调速器具有类似的性能,均应用很广。
随便看看
- 2024-09-25三一重工215-8C挖掘机故障代码
- 2024-10-09电阻连接及等效变换
- 2024-11-20配流盘的修理
- 2024-09-19溢流节流阀-液压传动基础知识
- 2024-09-19活塞杆直径的计算-液压传动基础知识