
2MC33030微型直流伺服电动机控制器/驱动器
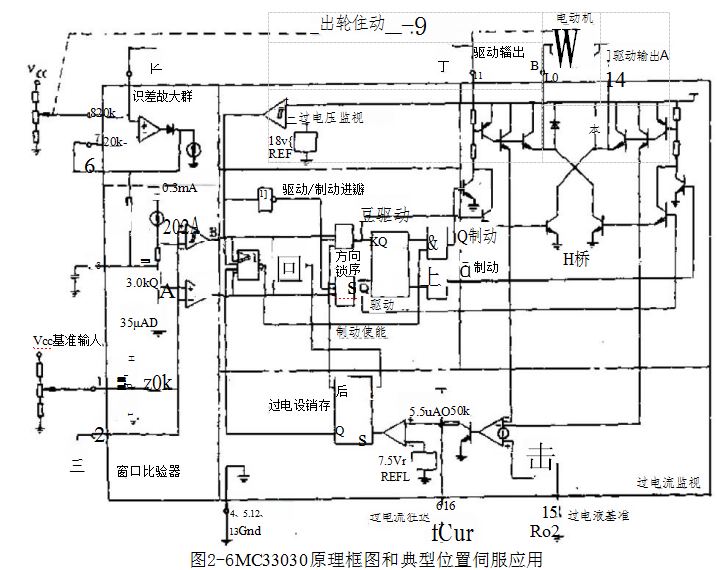
MOTOROLA公司生产的MC33030是一种适用于微型直流伺服电动机闭环位置控制和速度控制的单片专用集成电路。它包括了从接收反馈输入信号的误差放大器和参考输入端,直至末级H桥功率放大器,过电流和过电压保护在内的完整电路,只要少量外围元器件即可构成整个系统,实现对直流伺服电动机四象限开关式控制。
从图2-6框图可见,本芯片主要由下列几部分组成:·误差放大器。有宽共模输入范围
·窗口比较器。有一定的死区,自动调中基准输人
·有方向记忆的驱动/制动逻辑
·H桥功率开关。1A的驱动能力·可设置的过电流监测器
·可设置时延的过电流停机·过电压保护(18V动作)
该芯片采用16脚DIP塑料封装。其中4、5、12、13脚是接地端,也可接至电路板铜散热片上,以帮助散热。图2-7中给出芯片热阻、最大允许功耗与铜散热器尺寸的关系。
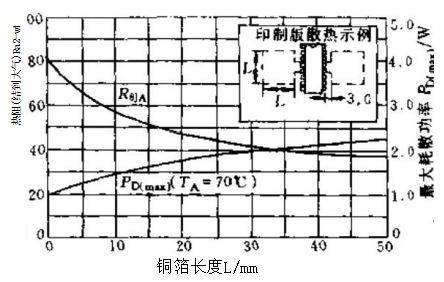
图2-7芯片热阻、最大允许功耗与铜散热器尺寸的关系
1.主要极限数据 | |
电源电压Vcc | 36V |
输入电压范围 | —0.3~36V |
H桥驱动输出电流 | 1.0A |
最大功耗 | 1W |
最高允许工作结温 | 150℃ |
工作环境温度范围 | -40~+85℃ |
结对空气的热阻 | 80℃/W |
结对外壳的热阻 | 15℃/W |
2.工作原理和在位置何服控制中的应用示例在图2-6中给出的典型电气位置伺服系统中,从1脚输入表示指令位置信号的基准电压。一台微型直流伺服电动机接至H桥驱动输出的A和B端(14脚和10脚)。它经过齿轮箱等减速机构去带动负载。同时它还带动一个电位器,作为实际位置反馈。反馈信号从8脚输入,经误差放大器缓冲后,送给3脚的窗口比较器输入端。
窗口比较器是由两个带滞后回环的比较器A和B组成的。它们从2脚接收基准输入信号,送至比较器B的同相输入端和比较器A的反相输入端。而3脚表示的反馈信号经两个30k2电阻送入比较器B和A的另一输入端。同时比较器B和A输入端还受两个35μA电流源的控制产生偏置,以形成死区。窗口比较器的工作下面将详述。
为了增加系统的柔性,芯片内设置有一个误差放大器。它可对实际位置信号起缓冲或放大作用。起放大作用时,使控制死区范围变窄。此放大器输出电流能力为1.8mA,吸入电流为250μA。在本应用示例中,它作为跟随器,驱动窗口比较器输入端。
末级H开关桥直接驱动直流电动机,并可实现制动。其输出或吸入电流能力为1A。当需要更大驱动电流时,需外接更大功率的晶体管开关。后述的速度控制应用将给出这样的例子。
过电流监视电路对电动机起动或堵转时可能出现过大电流进行监视和保护。H桥两个上桥臂输出电流的一部分送至电流比较器反相端。比较器的同相端是接电流的基准值。过电流基准值大小由15脚的外接电阻Roc决定。此过电流基准值应稍大于正常负载下的连续工作电流值。当出现过电流时,比较器翻转,有5.5μA的内部恒电流向接于16脚的延迟电容CDLr充电。待它充电达到7.5V的阈值时,将过电流锁存器触发为高电平输出,关闭了H桥输出。过电流延迟时间tp.Y(s)由CmY(μF)决定。
tDLY=1.36CDLY
例如,取Roc=15kΩ,CDLY=0.01μF。由产品说明书的输出电流与过电流基准电阻关系图,查得允许过电流值约500mA。由上式得tpu.Y≈1.36×0.01=14ms。
由于上述过电流监视器作用,允许本芯片H桥在短时间内向电动机提供较大的起动电流。如果电动机堵转,则经短时间后停机。采用此芯片的伺服系统不必设置限位开关。当电动机到达极限位置而堵转时,系统会自动停止供电。应注意CpLr不可过大,过长时间的过电流可能引起该芯片的过热,甚至永久性失效。过电流锁存器的复位可采用下列方法:电源重新合闸,或调节接1脚
的电位器,使3脚信号进入或穿过死区等。
过电压监视电路使芯片和电机在Vcc大于18V时关闭H桥输出,正常工作电压为7.5~17.4V,推荐工作电压为14V。
驱动/制动逻辑是该芯片主要部分。在图2-8所示的时序图
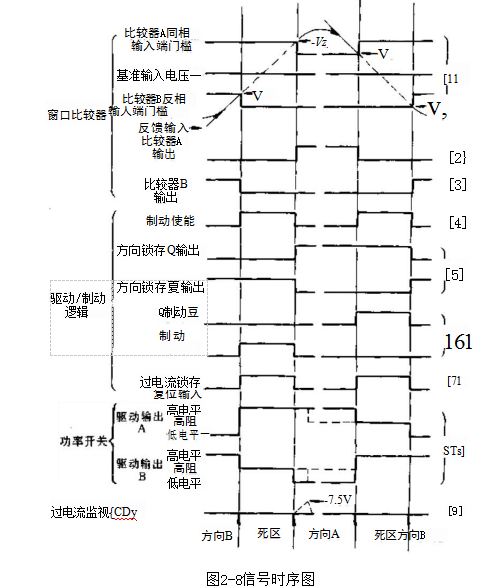
中,波形(1)表示窗口比较器的有关信号。其中
VPIN₂——2脚电压即设置的基准输入电压V₁~V——比较器A和B的输入门槛电压V₂——比较器A返回到ON的门槛电压
Vg---比较器A翻转到OFF的门槛电压V,一比较器B翻转到OFF的门槛电压V—比较器B返回到ON的门槛电压(V₂-V₃)——比较器A的输入滞后电压(V,-V)——比较器B的输入滞后电压(V₂-V₄)——窗口比较器输入死区范围
I(V₂-VPIN₂)一(VPIN₂-V₄)|—窗口比较器输入的失调
电压。
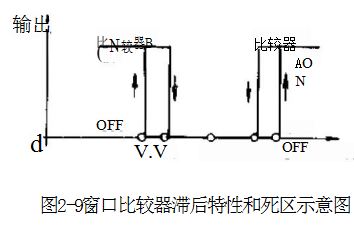
只要从3脚输入的信号在共模电压范围之内,V₁~V₄电压总是跟踪着2脚的基准电压,并以此基准电压为中心,如图2-9的滞后特性与死区示意图所示。它们的典型值是:滞后电压为35mV,死区范围为210mV,失调电压为25mV。
在信号时序图最下方,将时序从左到右分为四种工作状态。假如,最初实际位置未达到预定位置,即3脚电压VPINa尚低于V,
比较器B是ON状态,Q驱动,使驱动输出B高电平而驱动输出A为低电平,有电流从10脚经电动机流向14脚,使电动机正向旋转加速。待VPIN₃上升到大于V₁、则进入“死区”状态。比较器B翻转到OFF状态,VPIN₃在图中的虚线范围内时比较器A和B都是OFF状态,使制动有效,波形〔6〕的夏制动为高电平,使驱动输出A为高电平,驱动输出B为高阻态。系统惯性使电动机继续转动产生反电动势.并在下列回路形成续流:从10脚到输出B的续流二极管,再经Vc母线到输出A的上侧晶体管,回到14脚。此时电动机就像其两端被短接一样,制动电流产生的制动转矩使电动机停转。此时VPN₃停在“死区”波形〔1〕虚线的某个位置上。
如果系统惯性过大,上述制动不足以使电动机停下来,VPIN₃继续增加,大于V₂而冲出了“死区”,进入了“方向A”状态。此时,比较器A为ON状态,驱动输出A为高电平,输出B为低电平,电动机反向供电。使电动机反转,VPINs返回“死区”,如波形〔1〕虚线所示。类似于方向B情况分析那样,又冲出死区进入方向B状态。在两个方向上超越死区,过大超调量使电动机摆动振荡,应调整系统参数使之改善。
电动机运转方向是存储在方向锁存器的,以确定当VPIN₃进入死区之后是Q制动还是Q制动。波形〔8〕和〔9〕中的虚线表示出现起动过电流时的情况,经过电流时延后,系统保护动作,驱动输出A和B均进入高阻态。
误差放大器和窗口比较器输入处都有内部串接电阻和外部并接电容,以滤除电刷换向时的电噪声。电刷噪声频率范围是从直流至200MHz,应使用高品质RF旁路电容,容量为0.001~0.1μF,由试验确定。
在位置伺服应用中,除了上例用电位器作反馈传感器之外,还可以用光电、温度、磁通、压力等传感器,只需将它们转换成与之成正比的电压信号即可构成一个完整的定位系统,或光、温度、
压力……闭环控制系统。因此该芯片有广泛用途,如机器人控制、空气调节器、太阳跟踪、天线旋转系统等。
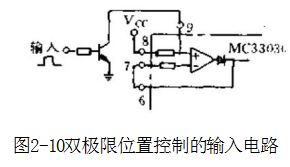
MC33030用作双极限位置控制见图2-10。被控机械设置两个机械限位机构。输入0和1对应于两位置的指令信号。当电动机被驱动到某一极限位置时,堵转使过电流监视动作,电动机停转,等待下一个反向指令到来再反向起动。
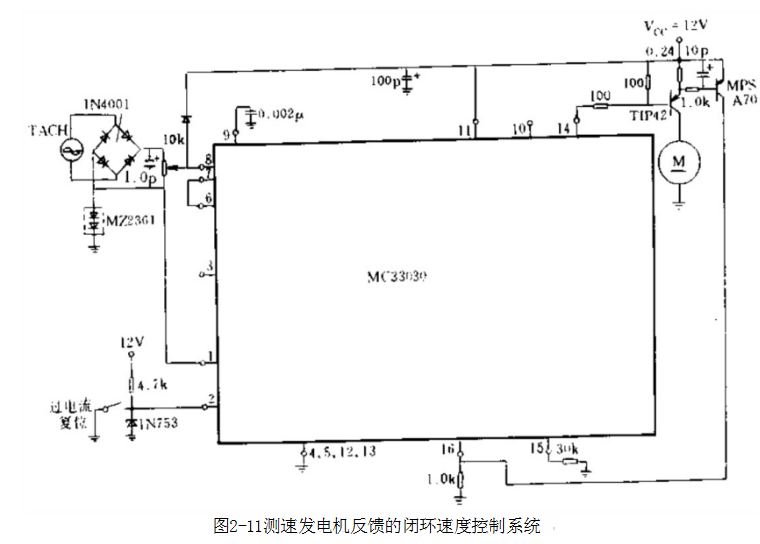
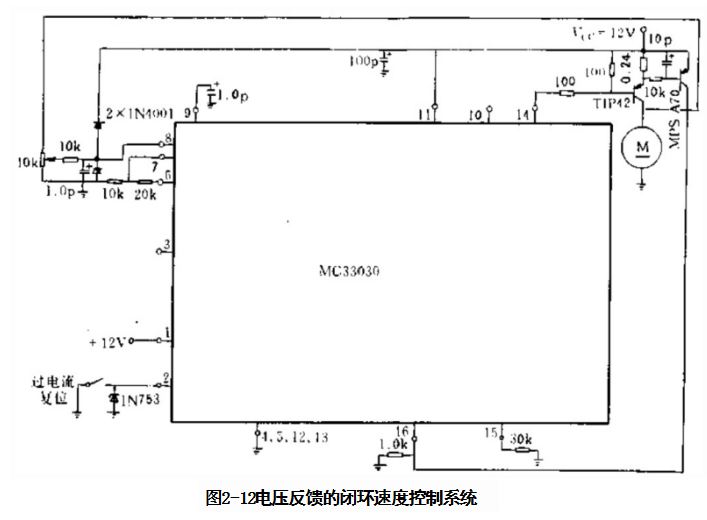
3.在闭环速度控制中的应用下列两个例子是MC33030在直流电动机开关型速度闭环控制中的应用。速度基准电压从2脚引入。获得反馈速度电压有两种方法:一种方法是用单相交流测速发电机,其输出经整流、滤波和整定用电位器送至8脚(见图2-11);另一种方法是从电动机一端引出与电动机反电动势相关的信号(见图2-12),经放大取平均值后作为3脚输入。利用驱动输出A作为单端输出,外接TIP42功率晶体管,驱动直流电动机,增大了控制功率。这两个例子表示了MC33030在单转向电动机中的应用。
电动机起动时,在VPIN₃低于V₄,驱动输出A(14脚)为低电平,使TIP42饱和,电动机加速。至VPN₃达到V₁后,14脚为高阻态,使电动机停止供电。电动机由惯性转动至VPN₃低于V₄才又重新驱动。由内部比较器B滞后回环作用,电动机处于PWM控制下维持于一定转速下工作。使用测速发电机的系统,在低速下仍有较好的稳速性能。
随便看看
- 2024-11-05柴油机增压简介
- 2024-09-20卡特CAT320挖掘机-故障代码
- 2024-09-13手册保管地点-挖掘机驾驶装置篇
- 2024-11-27我国液压技术简介
- 2024-09-27一般型号挖掘机行走无力的原因与维修