
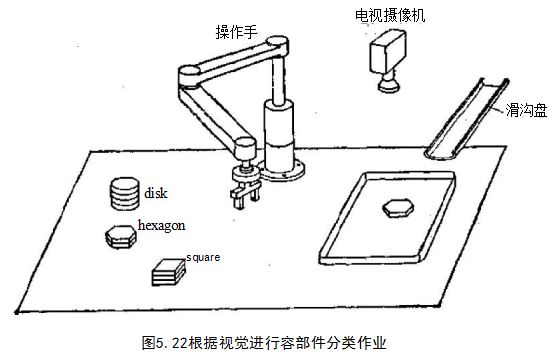
根据视觉的零部件分类
我们来编写执行下述作业的程序(图5.22),从滑沟盘,将圆形、正方形、六角形这三种板一个个随机地送进托盘。将落到盘内的板区分为圆板、正方板、六角板三类,并分别叠放在规定的地方.在执行这个作业时,板形的识别当然要靠视觉进行。抓取被识别后的板时,采用利用触觉的center,动作。另外,将板叠放时,用5.4.3节中所述的puton,并利用力觉稳稳当当地进行放置。郎这个作业是利用视觉、触觉、力觉的综合传感相互作用的例子。
板的种类的识别,是在视觉功能中,利用了样板匹配机能。事先将三种类形板的形状作为预比较模式disc(圆板),square(正方板),hexagon(六角板)登录下来,并与输入图像进行模式比
较。template-matching(templatelist,result,x,y,φ)这个视觉的功能,将输入图像与事先已登录下来的样板模式进行比较。
取得一致的样板名放在resule中,图心位置放在x,y中,惯性主轴的方向放在中中。因为x,y是视觉坐标系中的位置,所以事先有必要用calculate-world-coord这个功能将其变换到绝对坐标系。
为了抓取被识别的物体,利用5.4.2节中所说的center动作。为了正确抓取物体,在圆板与正方板的情况时,执行一次center动作后,张开手指回转90°,再执行一次center动作,在六角板时,回转60°之后再一次执行center动作。这样就可以让物体中心与指的中心一致而准确地抓取。
抓住了物体之后,沿着5.4.1节中所述的轨道,移动手将disc,square,hexagon分别运送到规定的地方。在叠放物体时,用图5.4.3节中所述的puton.根据puton的使用,物体将被稳稳当当地叠放到所规定的地方。手离开物体之后,返回到待机位置,视觉系统开始识别。它的程序可以概括如下:
processband-eye-example;begin
startIOput-hand-opening(full-opening);
whileTRUEdobegin
8lartIOtemplatc-matching(templatelist,result,x,y,中);startIOcalcu]ate-world-coord(x,ysφ,h,#如5yosαw)
casetesultot
disc:begin
move-deproach(#,ym,b,αo);center(grasp-force);
startIOput-hand-opening(full-opening);delay(T₀);
α=a十90
startlOput-aim-reference(*>yo,h,α);delay(T₉);center(grasp-farce);
move-deproach(Xdisc,Ydisc,zdisc,0)
puton;move-deproach(Xhome,Yhome,Zhame,ahome);
end:
*quare:begin
move-deproach(如>yosh,a);cepter(grasp-force);
startIOput-hand-opening(fuli-opeoing);delay(T₀);
a=αu十90;
startIOput-arm-reference(#ywshsαm);delay(T₀);
center(grasp-force);
move-deproach(X6quace,Ysquare,Zsquares0);
puton;
move-deproach(Xhome,Yhome,Zhome,αhpme);
end;
hexagon;begin
move-deproach(xm,ymo₅m);center(grasp-force);
tartIOput-hand-openipg(full-opening);delay(To);
α,=4o十60
utart[Oput-arm-reference(xyu,A,α);delay(T₀);
center(grasp-force);
move-deproacb(Xhex,Yhex,Zhex,0);puton;
move-deproach(Xhome,Yhome,Zhome,ahome);end;
end;end;
随便看看
- 2024-09-14安装橡胶履带板-挖掘机点检整备篇
- 2024-09-29大宇DH220LC - V 型挖掘机的规格和标准
- 2024-09-14履带梁的托链轮的齿轮油-挖掘机点检整备篇
- 2024-09-23凯斯挖掘机TR3发动机89故障代码
- 2024-12-11进口液压设备用油国产化替代原则、程序及注意事项