
曲柄的回转
回转曲柄对人来讲是最简单的。但对于机器人却是极为困难的动作之一。曲柄是沿着空间所确定的圆轨道运动的,如果让机器人必须按这个约束条件不断回转曲柄,则是困难的,位置控制的机器人,在空中可以描出近乎正确的圆轨道。但是,作为目标值所给出的圆轨道,若比由曲柄实际运动得到的圆轨道稍微偏离一点的话,则在强制其接近目标值时,可能不是曲柄折断就是机器人自身被损坏。为了不加上强制力,按照由曲柄所给的约束条件不断平滑地回转,则必须对作业中手所受的反作用力进行检测,并调节手的动作。即从物理意义上讲,为了沿着外部约束的轨道移动机器人的手,只有位置控制是不够的,还需要有力反馈控制。
当曲柄的中心位置(X,Yo,Z₀)和半径R给出时,试编写一个按一定速度回转曲柄的程序。回转曲柄的动作,是由在曲柄回转圆的切线方向驱动曲柄的过程,和进行力反馈让法线方向的反作用力变为0的过程,协调实现的。
下面我们把在曲柄回转圆的切线方向上所给的一定速度指令,在各个采样时刻,和在切线方向上前进一定距离的点被看成假目标点的情况下,置换为位置控制。如图5.21所示,手位于H点
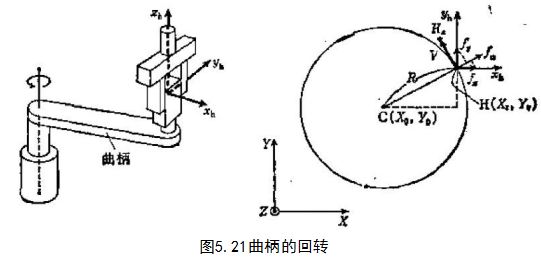
(X,Y,Z,,αr),作为单位时间后的目标位置,可以考虑是在切线方向仅前进了距离v(与回转速度相对应)的点H.,因为V的
X,Y分量是
Vx—V*(Y,一Yo)/RVy=·(X,—X₀)/R
所以,为了向H.点移动臂,给予臂的新目标值只要作如下更新即可:
X,=X,—V·(Y,—Y₀)/R
Y,←Y,+V·(X,一X₀)/R
上述目标值不一定与曲柄的回转圆相一致、因此,我们可以考虑利用装在手腕部的力传感器,根据让法线方向的反作用力变为0的控制,就可以让臂的位置适应曲柄的圆轨道。如果手的姿势角α被保持为0,从力传感器所测定的手坐标系中的fxsfy的值求法线方向的反作用力,则为
f。=fr·(X,一X₀)/R+fy+(Y,一Y₀)/R
为了让反作用力为0,只要在反作用力的作用方向上移动臂即可.即若设K为比例常数,则仅以K·f.修正臂的目标即可。因此,为了这种适应动作,可对臂的目标值作如下更新:
![]() Y,一#Y,+K·fo·(Y,Y₀)/R
Y,一#Y,+K·fo·(Y,Y₀)/R
若按照以上想法编写回转曲柄的程序,则为
processcranking;begin
cobeginturning;following;coend;
end;
processturning;
begin
whilestop=0dobegin
X=X,一V·(Y,一Yo)/RY,:=Y,十V·(X,一X,)/R
startIOput-arm-reference(X,,Y,,Z,,0);delay(T。);
end;end;
proce8sfollowing;begin
whilentop=0dobegin
就art10get-wrist-force(fysf,,fys州,my,m.);
g;一f·(X,-X,)/R+Jy(Y,-Yo)/R;
X,=X,+K+f.·(X,-X₀)/Ry
Y,:=Y,十K·f(Y,-Yc)/R;
Z,:=Z,+K·f
tart¹0put-arm~refereace(X,,Y,,2,,0);delay(T₀);end;
end;
随便看看
- 2024-10-12蓄能回路
- 2024-12-11液压油的使用管理
- 2024-12-24限压式单作用叶片泵的结构
- 2024-09-18电阻元件 -电路基础知识
- 2025-01-08BJT的结构三极管