
故障检测技术
故障诊断技术不断地监视机器的状态,当发生异常现象时,立即检测出故障,并能予以适当地处理,这种技术称之为故障诊断技术。故障诊断分两步进行,第一步是判断是否产生了故障,第二步是找出哪里产生了故障。
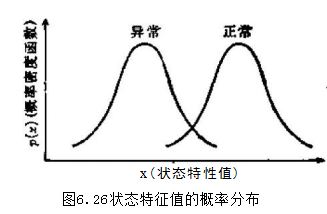
所谓故障检测,就是利用某种机械状态的特性值(振动程度、压力和转速等)因故障而发生变化的性能。当然,状态特性的变化是随机的。经常有图6.26那样的情况,即正常与异常时的概率分布曲线相重合(状态特性当然要尽量选取重合少的物理量作为指标)。因此,为了判断是否有故障,需要在机器的运转过程中,在线地收集状态特征的来样数据,然后归结到判断它们是否与正常情况下的原始数据集合相吻合,并检测出它们之间的偏差。正常情况下的原始数据集合为正态分布,一般当其方差相同时,用:检测法,不同时,用F检测法.当然,也可以不仅仅根据平均值的变化,而且还根据分布形状的不同来检测故障。
总之,因为是概率事件检测,所以还必须考虑下述错误概率。首先,第一是将异常判断为正常的概率(漏检概率),第二是将正常判断为异常的概率(误报概率),因为这两者是互相矛盾的,所以在何处进行折衷,要根据具体情况来决定,若要减小漏检概率,则误报率就会增大,因而必然由于过于保守而造成浪费。反之,若要减少误报概率,则使机械陷入恶劣状态的概率随之增大。
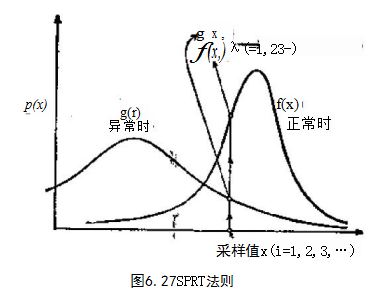
这里介绍一种著名的故障检测方法,即SPRT(Sequentialprobabilityratiotest).
首先,看一下某种状态特征值x,图6.27表明的是它出现的概率分布,该图表明,在正常和异常时概率分布是不同的,设它们的
概率密度函数分别为f(x),g(x),并且设在机械运转前已知这
些函数。这样,在机械开始运转后,按照时间序列对状态特性值x
进行采样,设采样值为x,x₂,湘,··这时我们定义下列Aj:
λ;一i-L—log(f(xr)/g(x₁))(6.17)Lo=0
在正常情况下,大部分采样满足
log(f(x:)/g(x:))>0
所以2在减小。相反,在异常情况下,A;必然增大。因此设定某些基准值A.,A,并可以进行下列判断:
2>A,(异常时)
A.>A>A,(不能判断)A>λ;(正常时)
但是误报概率c和漏检概率β可按以下公式进行计算:
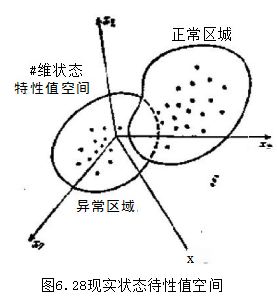
判断故障发生在何处,基本上可以归结为判断状态特性值(多数情况为向量)的测定值属于哪一范畴。但是实际上如图6.28所示,各元素之间的关系很复杂,所以采用多变量解析法和因子分析法来判断属于哪一范畴更有效。
另外,故障的原因及其结果所表现出的特征之间的关系并不是很明确的,而是含糊不清的。而且其现象大多象“发动机的声音有变化”那样,常常是变化莫测的。处理这一模糊现象的理论称为模糊理论。某种说明A是否正确,要用从属度函数μ(A)来定义,
p(A)的值域为0—1,如果说明完全错误,则(A)=0,如果完
全正确,则(A)=1.当0<μ(A)<1时,说明的正确与否
将是不明确的问题。(当然a(A)越接近1,说明的正确程度便越高.)从属度函数具有以下特性:
a(AUB)=max{μ(A),μ(B)}(6.20)
μ(A∩B)=min{(A),μ(B)}(6.21)
现在如果约定故障F=[fi,f₂,,fi,,fm],现象S=
[31,f,·,s,,s],那么有关各自的从属度函数μ(f),μ(f)便可以定义.进而我们设表示故障子,和现象s之间相关程度的从属度函数为ri。这时就可以考虑从属度函数相互之间具有下列关系:
另外,(6.23)式中的算子*,表示按(6.22)式进行运算,如果巳知R,并且推出a(s),则可以通过逆运算求出p(F)(参考书末列出的参考书[32]).
还有,近来发展颇为迅速的AI(人工智能)的应用,也取得了显著成效,这里只对上述事实作一些介绍。在AI运用于故障诊
断方面,它更适用于机械故障以外的人体故障,即在医疗诊断领域中的应用异常活跃,并构成了非常高级的系统。
纠错码当讨论限于通信系统时,为了进行错误检测,需要其备相当的理论知识。这里具体地介绍一下怎样考虑纠正错码问题。
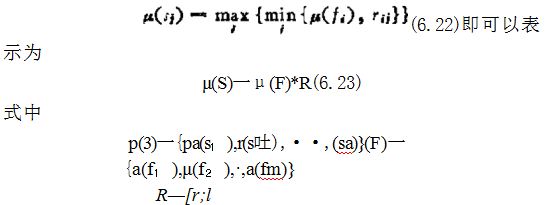
(1)汉明间距
现在对应于n维多面体,考虑字长为n的二进制文字序列.例如n一3时,文字序列可以用8个字表示,如图6.29所示,它们对应于立方体的各顶点。从图中的顶点A到顶点B,必须经过两条边,这说明A和B之间只有两个比特不同。这时称A和B之间的汉明间距是2。即对于将2进制数[0,1]作为文字序列,当取任意两个文字序列并表示成A=(q₁,4z,…,an),B=(b₁,
b₂,·,b₂)时,A、B的汉明间距△(A,B)可根据下式定义:
△(A,B)=Z(a;田b;)(6.24)
式中田为异或逻辑和。
如果这里设收到的文字序列为C,则可以判断,满足下式的
D;为发送的文字序列:

实际上,汉明间距与最优判定时的优良度相对应,它使得D;变成与C对应的最优解。让我们利用图6.29举一个简单例子。现在
设应当发送的文字序列为A=(0,0,0)或B=(1,1,1)时,
收信为C=(0,1,0)。此时若计算汉明间距,则为
△(A,C)=1
△(B,C)=2
C被A译码。
(2)奇偶校验
具体地讲,在数字通信中,最常使用的验误码对策就是奇偶校验,这种方法基本上是用最短的码加上很长的比特进行错误检测和校正。总之,在n比特的文字序列里,增加一个很长的比特,则不管是什么样的符号,却可以将逻辑1的比特变成偶数。这叫偶
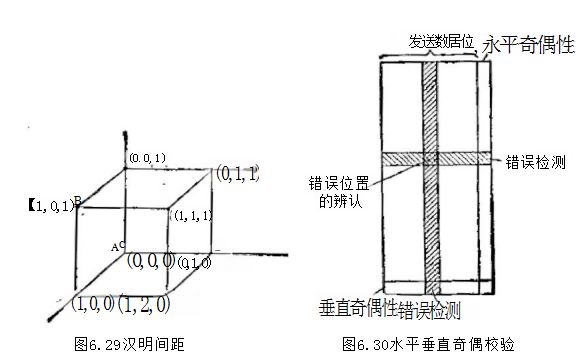
数奇数校验,如果文字序列中某一处产生反转,逻辑1的比特将变成奇数,从而可以检测出已产生了的错误。将这种方法按照图6.30那样,沿纵向进行检验,当只有一处错误时,错误位置的辨识和校正就是可能的。这称为水平垂直奇偶校验。
一般来说,当字长为n的文字序列某一处有错时,这时有#种情况,如果再加上没有错误的情况,则有(n+1)种情况。此时,为表示这种情况,需要的奇偶比特数k为:
2*>n十1(6.26)
如果设原来的数据字长为d,则
2(m-d)>n士1(6.27)
这时错误位置的辨识和校正都是可能的。当然,为了保证能最有效地设计出较好的代码,一般情况下k值应当很大。
(3)CRC码
CRC是cyclicredundancycheck的缩写,现将字长为#的
二进制文字序列A=(a₁,az,…,a.)与下面的多项式对应考虑。
F(X)=a₁+a₂X+··+a,Xn-(6.28)
例如将(110011)表示成F(X)=1+X+X⁴+X⁵
因为文字序列具有2*种类,所以声(X)也同样具有这么多种类。其中只有m阶多项式G(X)作为信息使用,并构成CRC码。
这里对于任意的k比特信息D(X)(k—1阶式),若定义下列n—1阶式H(X),则H(X)可以用G(X)除尽。但是,R(X)则是用G(X)除D(X)x(a-t)后所得余数。
H(X)一D(X)X(m-t)+R(X)(6.29)很明显,R(X)是加—I阶方程式.这里如果设m一n一k,那公H(X)的上位k项恰对应信息D(X)(数据位),而下位m项则恰对应R(X)(检查位),当发送这样的文字序列H(X)时,只要不能用G(X)将混入的错误E(X)除尽,就可以检测出错误。
这时的G(X)被称做生成多项式。作为G(X),可以有各种表达式,但具有代表性的式子已作为规范被确定下来。实际上检查位多数情况为16位,例如CRC-16采用G(X)一X¹⁶+X¹²十X²+1;CRC-CCITT则采用G(X)=X⁵+X¹²+X⁵+1.
在CRC中,如果G(X)的项数为2项以上,则单个错误可以全部检测出来,特别是在偶数项情况下有奇数个错误时,是全部可以检测出来的。另外,如果能检测出2n位的错误,就可以校正#位的错误。
(4)定比率码
在定长为》的二进制文字序列中,1这个位数只在a中使用(a/n码),考虑采用的出发点是简单明瞭,只要0→1,1→0的错误不是成对出现,就可以检测出错误,但是这种码的效率不一定高,而且不能使错误恢复到正常状态。
a/n码可以表示C。个信息。
(5)连送码
这是一种将同样的代码字母连续两次发送的送信方式.从原理上讲极为简单,虽然随机误差检查能力与奇偶检验相同,但对于检查数据段内的段错误(将在后面阐述),它具有相当大的优越性。
这种方式要求检查位与数据位具有同样长度,所以同其它方式比较,符号的效率较差。
(6)交错法
大多数可靠性理论,是由随机误差模型构成的,但从实际的物理现象来看,真正的随机误差模型是很少见的。即使对于噪声,实际上在多数情况下,也是在某一特定时间内使数据连续产生误差的。这种误差叫作区间误差.
纠错码未必适用于区间误差,因为要检验和纠正连续的复数误差,就必须在提高检验位与数据位之比的前提下,增大汉明距离,这样就码的全体而言就变得不经济了。
例如,现在设可以纠正口个误差的码为A,并设检查位与数据位之比为k]n,现在考虑用码A发送从A₀—Am-1,m个信号的情况。按普通顺序发送时,允许的区间误差长度最多为a位。但是象图6.31所示,如果首先发送A₀—A1的第1位,然后再发
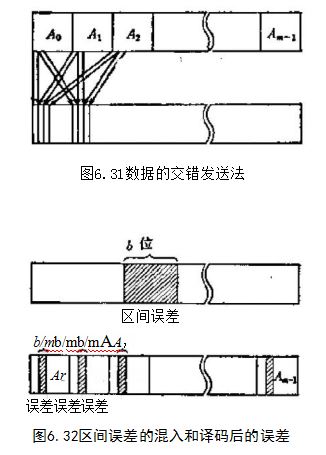
送第2位,那么即在b位时仍存在区间误差,此时最终混入信息中的区间误差长度是b/m,于是一直到am位的区间误差,都变成了允许误差.如果这样按时间把数据分割开来进行发送,就完全有可能不必改变符号检查位与数据位之比,而显著提高抗区间误差的特性了(图6.32)。这种方式叫作交错法(interleave)。
作为机械电子机器,因为多数系统情况下无法与电力系统分开,所以可以说它具备产生区间误差的条件、因而随着本方式对将来通信将成为一种极限性的使用方式,其重要性就显得愈加明显了。实际上,在往磁盘中写人信息时,已经构成了采用这种方式的具体实例。
随便看看
- 2024-11-14JBZ-01B快速电刷镀
- 2024-11-25A2F斜轴式定量柱塞泵
- 2024-09-23凯斯挖掘机TR3发动机87故障代码
- 2024-11-28工业技术在液压上的应用
- 2024-12-23液压零件磨损修复工艺镀铬工艺