
部件高可靠性的构成
部件的故障率故障率是在对部件进行定量分析的基础上得到的一个量,现在我们设某机械在0<r<:时间内发生的故障的概率为F(t),那么F(x)便称为累积故障率,很明显,这时F(0)=0,F(0)一1另外R(:)=1一F(t)(6.30)为无故障概率,叫做可靠性函数,如果设f(4)=dF/d,那么它便是概率密度函数,又叫故障率分布。此外,下式为1的期望值,它表示平均寿命
障时间(MTTF,meantimetofailure)或平
均故障间隔时间(MTBF,meantimebetweenfailure),前者涉皮不能修理的寿命(故障前平均时间),后者则涉及可以修理的寿命(平均无故障时间)。
如果对于时刻t,设正常运行的机械故障概率(瞬时概率)为λ(:),则存在下列关系:
f(t)一λ(t)R(t)(6.32)
如果将它整理后只写出R(z)时,便得到下列关系:
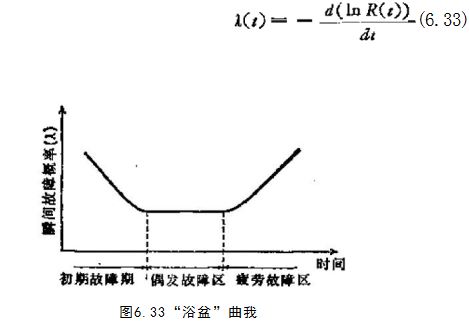
通常机械的瞬间故障率和时间的关系,如图6.33所示,其形状叫“浴盆”(bath-tab)曲线,浴盆曲线可以典型地分成三个部分,即故障率减小部分,故障率保持一定部分,和故障率增加部分。第一部分由于没有能够完全排除硬件和软件设计上的不完善而引起的故障,它被称做初期故障。对于初期故障期,随着时间的推移,设计会不断得到完善,其敌障发生率也会不断下降。但是,即使初期故障完全清除,也不能保证故障率为0,第二部分,即故障率为一定的部分叫做偶发故障期,偶发故障本身是一种随机产生的故障,采用概率分析的方法最为合适,因而,模块化也极为简单。当λ(r)一λ(一定)时,故障率分布为指数分布,即可以用
f()一λ·exp(一2f)(6.34)
表示。其可靠度可以用固定公式
R(t)=exp(一λt)(6.35)
表示。浴盆曲线的最后部分叫疲劳故障期,它是随着机械本身的老化而使故障率增加的时期.
并联连接部件的高可靠度在减少单个部件故障率比较困难的情况下,利用部件的冗余度可以降低整体的故障率。如像在机械电子机器中那样,在对联机性要求较强的应用中,这种考虑是必不可少的。
![]() 现在系统基本上由”个部件(可靠性为(im1—n))组成,如果这时其中某一个部件发生故障,就会导致系统停止运行,那么这种系统的构成就像图6.34(a)那样同串联系统一样。这种系统的可靠性R可以用公式来计算
现在系统基本上由”个部件(可靠性为(im1—n))组成,如果这时其中某一个部件发生故障,就会导致系统停止运行,那么这种系统的构成就像图6.34(a)那样同串联系统一样。这种系统的可靠性R可以用公式来计算

为了提高此系统的可靠性,最简单的方法是实现系统的并联化、如果考虑用继电器做部件,现在就可用最简单的方法将原系统按6.3.2节那样实现m个系统并联化,此时的可靠度R*可写成
R*=I一(1—R)”(6.37)
当然这时R*>R,设故障为偶发性的,且假定所有部件的故障
率λ相等,则有
;=r一exp(一λr)(6.38)
所以在串联系统的情况下,有R-y
E(t)=1/nλ而在并联系统情况下,则有
R*=1-(1—r)-
E*(t)一(1+1/2+·+1/m)/n显然,这果R<R*,E(t)<E*(r).
(6.39)(6.40)
(6.41)(6.42)
另一种选择方案是,像图6.34(c)那样,将部件每一级都并联
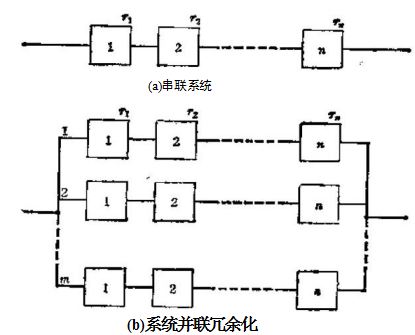
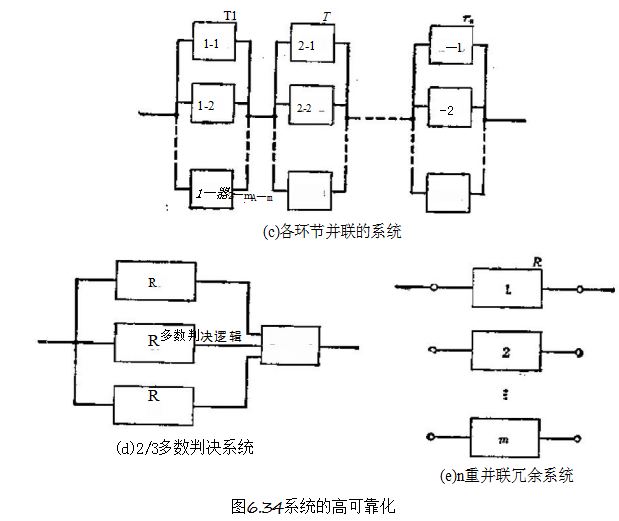
连接,然后考虑将它像原来的系统那样串联连接起来。此时的可靠度R**为

此时λ值很小,若设1—r的微小量为△,求R*和R**,则为
R*~1—(n△)(6.44)R**~1n△”(6.45)
且R**>R*.特别是在力值较大时,上述效果更为显著。
上述系统叫做并联系统。如果使用同样的m个环节组成冗余系统,如像图6.34(c)那样进行配置,显然比较优越。事实上,如果把转换开关的可靠性也考虑在内,虽然问题不会像上面那样简单,但这一事实却显示了在机械电子机器那样复杂的机械中,尽可能在局部范围内排除故障的重要性,这与前面论述的分散化观点同属一类问题。
多数判决系统在实际中,很难说哪一个部件运转的更好,或者更确切地说,到底哪一个部件易出故障,多半是不清楚的。在这种情况下,经常采用多数判决系统。这种系统如图6.34(d)所示,它并联配置了三个可靠度为R的系统,只要不是四个系统同时产生故障,系统就能正常工作。此时的可靠度R*为
R*=₂C₃R³+₃C₂R²(1—R)=3R²--2R³((6.46)
当R趋近1时,R*>R,预期可靠性将提高,例如,当R—0.9
时,R*一0.972.特别是当假定为偶发故障时,
R(r)=exp(一1)(6.47)
因此
R*(t)=(3—2exp(一λr))exp(-2A:)(6.48)
此外,MTBF为
E*(t)=5/6λ(6.49)
多数判决原理与MTBF的延长无关。
待机冗余系统在并联系统中,由于两个以上的部件总是处于运行状态,所以对冗余部分的寿命会产生不良影响。因此,冗
余系统常常会发生停机,引起故障,但是可以设法替换下产生故障的部件。此时,由于换上去的新部件的可靠性非常高,所以它可以提高整个系统的可靠性。这种考虑方案被称做待机冗余系统。对于图6.34(e)所示的m重待机系统,假定产生了偶发故障,并且不考虑转换开关的故障,则
R*(t)=exp(一λ)Z(2:)*/k!(6.50)
如果假定辨2(二重系统),则
R*(t)=(1—λr)exp(—λ)(6.51))
E*()一2/λ(6.52)
如果不考虑切换时间,那么对于偶发故障而言,待机系统是极有效的系统,但是对于一刻都不能停下来的系统来讲,它未必适当。另外,特别是在机械零件中,如果只认为待机中不会产生降低可靠性等情况,则其结果也只能是理论上的。
高可靠度系统基于上述考虑,让我们介绍一下如何具体地开发高可靠度系统。
图6.35是由Stanford研究所开发的,超高可靠度计算机的基本构造。这种叫SIFT(softwareimplementedfaulttoler-ant)的系统,是在同样的八台计算机中执行同样的程序,并且将演算结果在每次执行程序后,在各处理器上同时发信。总之,利用软件实现多数判决原理,以屏蔽由于故障而引起的错误。此外,程序的同步靠时钟的同步保证。再者故障部分可作为硬件备件,从而具有实现系统重新构成的机能。
图6.36是由Draper研究所开发的叫FTMP(faulttolerantmultiprocessor)”的系统,它与前者相比实现了硬件上的高度可靠化。它将处理器、存贮器相互间的信息处理及信息传送,全都在
1)Wensley,J.H,eral.:SIFT——DesignandAnalyaisofaFaultTolc-
rantComputerforAircraftControl,Proc.IEEE,Vol.66,No.10,
(1978),p.1240.
2)Hopkins,A.L.eal.FTMP-——AHighlyReliableFaultTolerant
MultiprocessorforAircraft,Proc,IEEE,Vol,66,Na.10(197B),p
比特单位上,按照多数判决方式进行工作。处理器、存贮器及总线各自为三章系统,并且分别叫做处理器三重组合、总线三重组合和存贮器三重组合。
随便看看
- 2024-09-12注意工作机械-挖掘机安全使用维护手册
- 2024-09-14向操作杆添加润滑脂-挖掘机点检整备篇
- 2024-09-14每2000小时的整备-挖掘机点检整备篇
- 2024-09-18主要部件-挖掘机规格篇
- 2024-10-01XEM220LC型液压挖掘机的油温过高现象