
抓取物体的动作(触觉的利用)
假想机器人同时闭合两指来抓取物体。机器人抓取物体时,我们希望机器人不要碰动那个物体,稳稳地抓起,若机器人的位置决定的准确,物体被放置的位置也能正确指示的话,则机器人可以不碰动物体而正确抓住。但是只要二者中有一个不准确,则抓物时一定会碰动物体,通常,当手指的中心位置,能够适应物体的中心位置而进行抓取动作时,是最理想的,我们常常称其为center动作.为了实现center动作,需要有敏感的触觉,幸好我们在假想机器人中,已给其两指内侧加上了触觉,所以下面我们试对center动作进行编程。
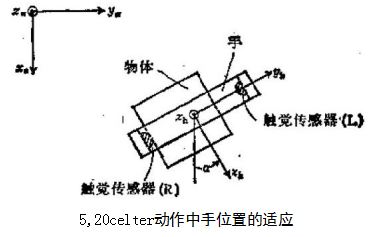
我们试图让center动作由两个并行动作的过程来实现。一个过程是缓慢闭合手指的过程,另一个过程是在闭合手指时,无论右指或左指中哪一个只要一接触物体,就在接触方向上,让手整体运动,从而使手完成脱离开物体这样一个动作。我们考虑一下如图5.20所示仅右指接触的情况。这时物体未动,为了在每单位时间内让指的宽度闭合28,手的位置有必要在yn方向上仅退避一δ.因为动作指令是按绝对坐标系给的,所以若设手的姿势为a,则只要在方向上移动δsina,y。方向上移动一8cosα即可。通过这两个过程的协调动作,就可以实现不碰动物体,且让手指闭合。两指的触觉对于ON情况时,因为手指处于夹持物体的
状态,所以加上适当的力,就可稳稳地把持住物体。下面列出了实现center动作的程序。此外,并行动作的二个过程closing及adapting,在两指的触觉变为ON时,即宣告结束。W,<s是用来检测指的张开度是否微小。W,<E时,看成两指已完成闭合
动作,两触觉变成ON状态。procesacenter(graap-force);begin
gtartIOget-touch-sengor(L,R);
cobeginclosingsadapting;coend;ifW,<8thenerror;
startIOput-grasp-force(grasp-force);
eod;
procetclosing;begin
while(R=0)ar(L=0)dobegin
W,;=W,-b;startIOput-hand-openiog(W,);delay(T.);start10get-touch-sengor(L,R);
end;end;
procEadapting;
begip
while(R-0)or(L=0)do
startIOget-touch-senior(L,R);
if(R=1)and(L=0)thenbegin
X,:mX,+6*sin(a);Y,:=Y,一6*cos(a);end:
elseif(R一0)and(L=1)thenbegin
X,;=X,一西*sin(α);Y,:=Y,+δ*cos(α);endʒ
tartiOput-arm-refereyce(X,,Y,,Z,,α,);delay(T₀);
epd;end;
随便看看
- 2024-09-20发动机各缸喷油量不均匀修正
- 2024-11-2625YCY14-1B型美情服离套的加工工艺过程
- 2024-11-22传动花键轴的修理
- 2024-09-19缸盖连接螺栓的强度计算-液压传动基础知识
- 2024-11-29查找液压故障的方法(故障诊断法)