
吊臂伸缩操作GT55OE
吊臂伸缩操作
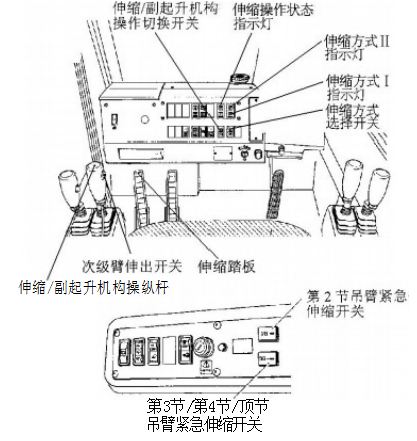
操纵装置(ISO配置方式)
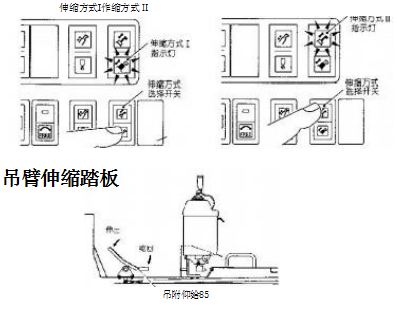
伸缩方式选择开关的使用方法
●强度…伸缩方式I>伸缩方式Ⅱ
●稳定…伸缩方式I<伸缩方式Ⅱ1.吊臂完全缩回状态
◆吊臂未完全缩回时,即使按下伸缩方式选择开关也不能改变伸缩方式。
2.按下伸缩方式选择开关,选择吊臂伸缩方式I或吊臂伸缩方式Ⅱ。
◆确认对应于所选择方式的指示灯点亮。
吊臂伸缩操作【注意事项】
◆由于液压油温度的变化,伸出的吊臂经过一段时间后会稍稍缩回。例如,液压油温度降低10℃,会使伸出5m的吊臂缩回约40mm。除温度外,吊臂的伸缩状态、吊臂的角度、润滑状态等,都对回缩量有影响。
◆在吊臂角度76°以上缩回吊臂时,应在距离吊臂全缩
长度2m之前停止缩回,以防止主吊钩与副臂接触。
吊臂伸出操作(吊臂伸缩方式I)
1.将伸缩/副起升机构操作切换开关置于[boom
telescoping(吊臂伸缩)]侧,并将伸缩方式选择开关置于[I]侧。
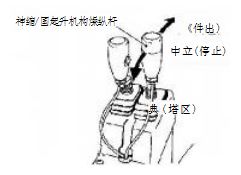
2.将伸缩/副起升机构操纵杆向前推,伸出第2节臂。
3.一旦第2节臂完全伸出,便在伸缩/副起升机构操纵杆保持在伸出侧时按下次级臂伸出开关。第3、4节和顶节臂便同时伸出。
◆当第3、4节和顶节臂开始伸出时,释放次级臂伸出开关。4.一旦吊臂伸到目标的长度,便使操纵杆返回到中立位置。
吊臂伸出操作(吊臂伸缩方式Ⅱ)
1.将伸缩/副起升机构操作切换开关置于[boomtelescoping(吊臂伸缩)]侧,并将伸缩方式选择开关置于[Ⅱ]侧。
2.向前推伸缩/副起升机构操纵杆,第3、4节和顶节臂便同时伸出。
3.一旦第3节~顶节臂完全伸出,便在伸缩/副起升机构操纵杆保持在伸出侧时按下次级臂伸出开关,第2节臂便会伸出。
◆当第2节臂开始伸出时,释放次级臂伸出开关。
4.一旦吊臂伸到目标的长度,便使操纵杆返回到中立位置。
吊臂缩回操作(吊臂伸缩方式I)
1.向后拉伸缩/副起升机构操纵杆。如果吊臂已经完全伸出,第3、4节和顶节臂便会首先缩回。待第3节~顶节臂完全缩回后,第2节臂便开始缩回。
2.一旦吊臂缩到目标的长度,便使伸缩/副起升机构操纵杆返回到中立位置。
吊臂缩回操作(吊臂伸缩方式Ⅱ)
1.向后拉伸缩/副起升机构操纵杆。如果吊臂已经完全伸出,第2节臂便会首先缩回。待第2节臂完全缩回后,第3、4节和顶节臂便开始同时缩回。
2.一旦吊臂缩到目标的长度,便使伸缩/副起升机构操纵杆返回到中立位置。
紧急伸缩操作
A进行紧急伸缩操作时,吊臂不再处于正规的伸出状态。必须使用紧急伸缩操作时,应在吊钩空载状态下进行操作。
由于吊臂长度检出器等的故障,使吊臂无法伸出或缩
回时,可使用紧急伸缩操作收存吊臂。
为了进行检查或维护,当需要按照非正规的顺序伸出或缩回某一节臂时,也可使用紧急伸缩操作。
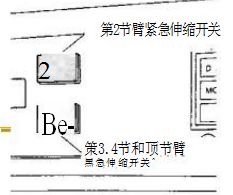
第2节吊臂的紧急伸缩操作
按下第2节臂紧急伸缩开关时,操作伸缩/副起升机构操纵杆。
第3、4节和顶节臂的紧急伸缩操作
按下第3、4节和顶节臂紧急伸缩开关时,操作伸缩/副起升机构操纵杆。
随便看看
- 2024-09-29石油基柴油发动机燃料
- 2024-11-14JBZ-01B电镀修复法
- 2024-09-14加锁-挖掘机驾驶操作篇
- 2024-12-23液压零件磨损修复工艺化学镀镍
- 2024-09-20常用的电点火系统