
吊臂伸缩操作GT35OE、GT25OE
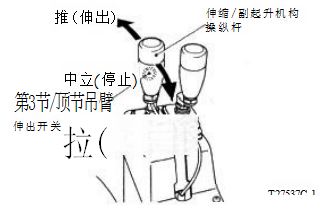
吊臂由四节构成。使用伸缩/副起升机构操纵杆、伸缩踏板、伸缩/副起升机构切换开关和第3节/顶节吊臂伸出开关,控制这些臂节的伸缩。
改变伸缩/副起升机构操纵杆和伸缩踏板的操作量,并利用油门踏板控制伸缩的速度。
吊臂伸出操作
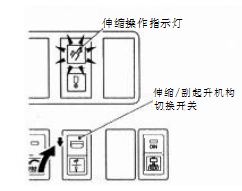
1.将伸缩/副起升机构切换开关扳到“boomtelescoping"侧。
◆扳动开关时,要按下开关上的锁止按钮。
◆确认伸缩操作指示灯点亮。
![]() 2.将伸缩/副起升机构操纵杆向前推,伸出第2节吊臂。
2.将伸缩/副起升机构操纵杆向前推,伸出第2节吊臂。
3.第2节吊臂完全伸出后,继续推住伸缩/副起升机构操纵杆并按下第3节,顶节吊臂伸出开关。第3节吊臂和顶节吊臂便会同步地伸出。
◆当第3节吊臂和顶节吊臂开始伸出时,即可把开关释放。
4.一旦吊臂伸到目标的长度,便使伸缩/副起升机构操纵杆返回到中立位置。
吊臂缩回操作
1.将伸缩/副起升机构切换开关扳到“boomtelescoping”侧。
◆扳动开关时,要按下开关上的锁止按钮。
◆确认伸缩操作指示灯点亮。
2.将伸缩/副起升机构操纵杆向后拉。吊臂便开始缩回。在缩回处于完全伸出状态的吊臂时,第3节吊臂和顶节吊臂会首先同步地缩回。第3节吊臂和顶节吊臂完全缩回后,
第2节吊臂便会缩回。
3.一旦吊臂缩回到目标的长度,便使伸缩/副起升机构操纵杆返回到中立位置。
伸缩踏板操作同GT550E紧急伸缩
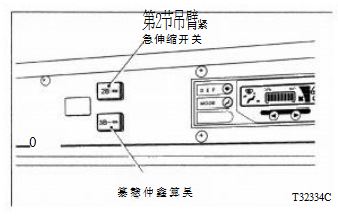
第2节吊臂的紧急伸缩操作
在按下第2节吊臂紧急伸缩开关时,操作伸缩■/副起升机构操纵杆。第2节吊臂便会伸出或■缩回,而与第3节及顶节吊臂的状态无关。
第3节/顶节吊臂的紧急伸缩操作
在按下第3节,顶节吊臂紧急伸缩开关时,操作伸缩/副起升机构操纵杆。第3节和顶节吊臂便会伸出或缩回,而与第2节吊臂的状态无关。
随便看看
- 2024-09-14每2000小时的整备-挖掘机点检整备篇
- 2024-09-19微量节流阀-液压传动基础知识
- 2024-10-12动力控制回路
- 2024-10-18发动机点火延迟
- 2024-09-20日立故障代码0175-03:机油温度传感器和蓄电池正极断路/短路