
TDA7272直流电动机速度控制器
TDA7272是微型少槽直流电动机速度控制单片集成电路,适用于盒式录放机。它利用此种电动机电流中包含的转速频率信息实现速度闭环控制,再加上电流闭环控制获得系统的长时间稳定性和快速整定性能。正转和反转速度可分别整定。有短路电流保护和过热保护功能。H桥驱动输出,工作电压为5~18V,最大输出电流为1A。采用20脚DIP塑料封装方式。
1.工作原理TDA7272是一个设计独特的转速控制系统,它不必使用外加测速发电机,它的速度信息来自电动机的电流。通常使用的微型直流电动机只有少量的基数槽,如3、5、7…槽。运
转时电动机电流中包含每转确定个数的交变谐波分量。利用这个转速频率信息可替代低分辨率的交流测速发电机。由于每转极数少,系统响应性能差。再用一个前馈回路以改善这个系统。它利用芯片内附加控制支路检测出电动机电流平均值,引入控制回路。这个没有延迟的环路,使系统具有快速整定性能。
如图2-41所示,电动机电流流过接10脚和地之间的采样电阻R,。速度信息从10脚经电容Cp引到1脚,Cb和1脚输入电阻5000构成一个高通滤波器。1脚内有25mV偏压,每输入一个过.零信号,使输入比较器翻转一次,比较器有10mV的滞环,以抑制噪声影响。随后到微分器,微分器输出到触发单稳电路。单稳电路的输出电流和持续时间T是由外接元件Cr和RT整定的。单稳电路输出电流代表实际转速。由17、20脚的外接电位器Rpi,Rp₂设定速度,经内电路变为代表设定速度的参考电流,在误差放大器反相输入端(14脚)与单稳电路电流相比较。
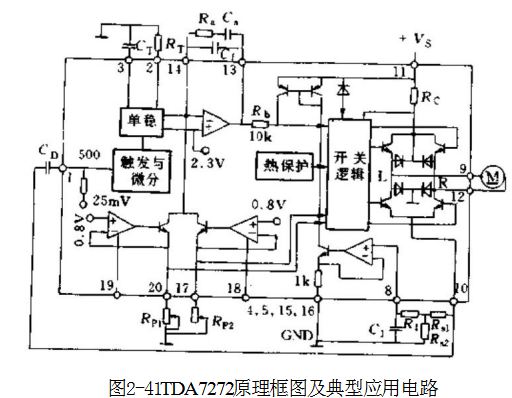
第二个快速环路由电压/电流(V/I)变换器组成,电流采样信号经R₁、C₁低通滤波后从8脚输入,由PNP管电流镜象使输出
电流注入到内部电阻R₆上。快速回路信号和误差放大器输出信号叠加后送人功率输出级。H桥式功率级由四个达林顿晶体管及续流二极管组成。
由18和19脚不同逻辑组合使功率输出级有三种工作方式:
(1)正常运转、正转或反转。两个上桥臂晶体管工作于跟随器工作状态,而下桥臂为开关状态。
(2)停机。上桥臂开路,下桥臂导通。
(3)高阻态。H桥四晶体管全部截止。
当电源电压大于20V或芯片结温高于150℃时,H桥呈高阻态。内部有短路电流保护,当输出电流大于1.5A时动作。
芯片内设有3.5V电源,供各部分电路使用。
2.引脚功能与应用
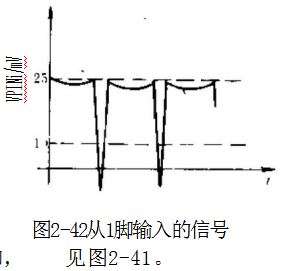
引脚1:触发输入。将10脚电动机电流信号经电容Cp引入1脚。如图2-42所示,1脚内有25mV的偏压和10mV的带环,触发电平是0V。因此,采样电阻R,应取足够大,应使在1脚的负向脉冲信号大于30mV。但这个值对V/I变换的8脚输入又太大,常用两个
电阻分压后输入给8脚,R,=R₄+R₂,
引脚2、3:定时电阻和电容(R、CT)端。由RT决定一恒流值向Cr充电,达到内部门槛电压后快速放电。R┐和Cr决定了单稳电路的输出脉冲宽度。
T=2.88RTCT
引脚6、7:空脚。
引脚4、5、15、16:地。
引脚8:V/I变换器的输入端。此变换器产生负阻输出,Rour=-9R,。此负阻用来补偿电动机电枢电阻R,可取R,≤R./9。如
前所述,R.的取值还受1脚信号需求的限制。因此取R。₂满足下式即可:
R,₂=R./10
引脚9和12:接电动机的驱动输出端。引脚10:接电流采样电阻R。
引脚11:电源正极。
引脚13和14:误差放大器输出和反相输入端.内部同相输入端接一基准电压2.3V。在稳态下,通常使单稳电路输出脉冲占空比为50%左右。这样,转速n(r/min)和电动机换向器片数(即转子槽数)M有下列关系:
式中RRP17、20脚的外接电阻并联值。
引脚17、20:速度调节端。取Rp,Rp₂不同电阻值可设定正转和反转的转速。如果正反转转速相同,可共用一个电阻RRP。
引脚18、19:功能逻辑控制输入端。由两脚输入逻辑电平组合控制驱动输出工作方式,见表2-5。
表2-518,19脚逻辑组合功能控制
输入脚 | 输出脚 |
输出 |
功能 | ||
18 | 19 | 12 | 9 | ||
L | L | L | L | 停 | 机 |
H | L | L | 调节 | 正 | 转 |
L | H | 调节 | L | 反 | 转 |
H | H | 高阻 | 高阻 | 开 | 路 |
按典型应用电路,当电源电压变化为6~16V、电动机负载转矩变化为0.08~1.2mN·m,则电动机转速变化在0.2%以内。这里使用的电动机是3槽的,R.=160,工作转速n=2000r/min。电路使用外接元件数据见表2-6,表中还给出了参数改变可能引起性能改变的情况。
3.其他应用该芯片也可用于外接各种测速发电机的应用,如电磁式单相交流测速发电机、光电编码器、霍尔测速发电机等。
注意测速信号从1脚输人时,最好有双二极管筘位。图2-43所示例子中,由微处理器给出18、19脚控制逻辑信号和速度设定电平(从微处理器的D/A给出)。
也可由9和12脚输出外接大功率H桥集成电路(如L298等),以扩大输出电流,供较大功率电动机的驱动。
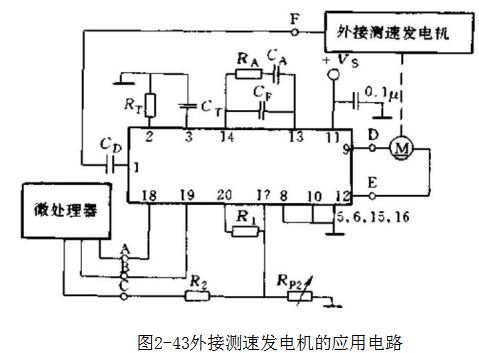
表2-6外接元件参数的选择
元件 |
推荐值 |
用途 |
过大 |
过小 | 允许范围 | |
最小 | 最大 | |||||
R | 10 | 测速环电流采样 | 测速环不可调节 | 0 | ||
Raz | 1.5Ω | V/I变换环电流采样 | 不稳定 | 欠补偿 | 0 | R./9 |
RLCL | 22kΩ68nF | 滤去火花噪声 | 使V/I调节器响应慢 | 输出纹波大 | ||
Co | 68nF | 脉冲传输 | 33nF | 100nF | ||
RTCT | 15kQ47nF | 调节单稳输出脉冲占空比、约50%最佳 |
6kΩ |
30kΩ | ||
元件 |
推荐值 |
用途 |
过大 |
过小 | 允许范围 | |
最小 | 最大 | |||||
RP₁,RP₂ | 47kQ | 调节速度 | 低速 | 高速 | ||
CF |
100nF | 减少纹波、环路响应时间 | 低纹波、响应慢 | 高纹波,较快响应 |
10nF |
470nF |
RACA | 220kΩ220nF | 快速无超调响应 | 取决于系统的机电参数 | 10kΩ10nF | 10M01μF | |
随便看看
- 2024-12-31挖掘机突然熄火故障
- 2024-09-13发动机开始工作-挖掘机驾驶操作篇
- 2024-09-18推广-电路基础知识
- 2024-09-12注意指挥信号和标识-挖掘机安全使用维护手册
- 2024-10-31液压系统的同步回路