
变换矩阵
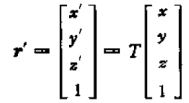
设T为四行四列变换矩阵,则变换前的位置向量r和变换后的位置向量r的关系可用下式表示:
r—Tr
r的四个分量若依次以x',y,z,1表示时,有
变换矩阵T的十六个分量,正如以下所示,依变换内容而异。
定标(scaling)设将位置向量的x,y,z分量分别定标(扩大成缩小)λ,p,》倍的变换矩阵为T₃时,有
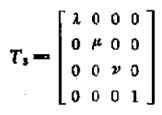
2,μ,2叫作定标比例系数(scalingfactor)。
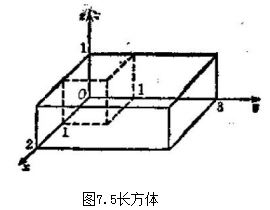
将长,宽,高分别为2,3,1的长方体(图7.5),变换成各棱为1的立方体,可分别令其定标系数λ,μ,》为2,3,1.
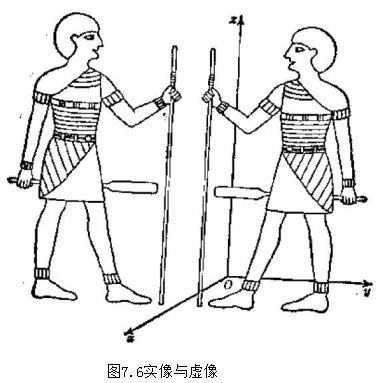
此定标系数也可给定为负值。例如设一—1,其它都设为1时,xy平面进行了对称变换,亦即可以得到镜面反射像(虚像)(图7.6).
旋转(rotation)设分别为旋转角α,φ,θ绕x,y,z轴旋
转的变换矩阵为Rx,R,,R,,则有
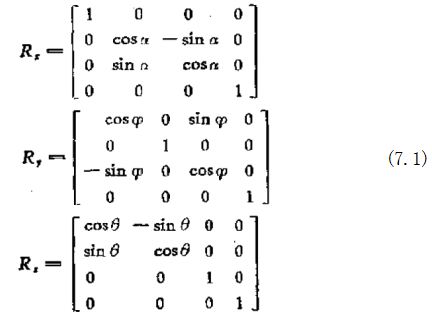
此外,从原点观着各轴旋转方向,以向右旋转(右螺旋旋转方向)定为正方向。
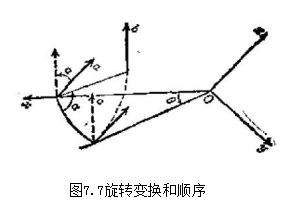
此位置向量r,按照z轴、x轴、y轴的顺序,依次进行旋转变换时,则旋转变换矩阵为Ry,Rx,R,之积,即R₇R₈Ra。积的
顺序是变换的逆顺序.在图7.7上,当采用R,R,时,则a移向b,可是采用R₂R。时,却移向c.
平移(translation)设在x,y,x方向上,分别平行移动xo,
yos0o的变换矩阵为T,时,有
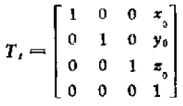
定标和旋转变换不用齐次坐标系,可用三行三列矩阵来处理,可是处理平移时就需要齐次坐标系。
需要同时进行定标、旋转和平移变换时,可以按变换的逆顺序求变换的积。
例如按照定标T,、旋转R、平移T,的顺序执行时,则得r一T,·R.·T,·r
随便看看
- 2024-12-25机器人学的意义
- 2024-09-19 缸筒内径的计算-液压传动基础知识
- 2024-09-20日立故障代码0041-03:8V直流电源和蓄电池正极短路
- 2024-09-29液压系统滤油器
- 2024-09-20喷油泵—喷油器式电控系统