
直流电动机控制专用集成电路
尽管近年来直流电动机不断受到交流电动机及其他电动机的 挑战,但至今直流电动机仍然是大多数变速运动控制和闭环位置 伺服控制最优先的选择。因为它具有良好的线性特性、优异的控 制性能、高的效率等优点。特别是在中小功率系统中,常采用永 磁直流电动机,只需对电枢回路一个回路进行控制、电子控制电 路相对较简单。而无刷直流电动机、步进电动机、交流异步电动 机或开关磁阻电动机都是多回路的控制,电路要复杂得多,由于 需要更多的功率开关器件,使成本相应增大。虽然直流电动机存 在电刷磨损、换向火花等对可靠性不利的因素和需要较多的维护, 但对于许多实际的应用来说,用现代技术制造的直流电动机的可 靠性还是足够的。为适应小型直流电动机的广泛应用需要,各国 半导体厂商推出了大量的直流电动机控制专用集成电路。
对于永磁直流电动机或他 励直流电动机,其等效电路见图 2-1。反电动势E, 可看作可变电 压源,它和电动机转速n 成正比 关系。电磁转矩T. 与电枢电流 1.也呈正比关系。电枢电阻R 通常较小,在电动机起动和堵转
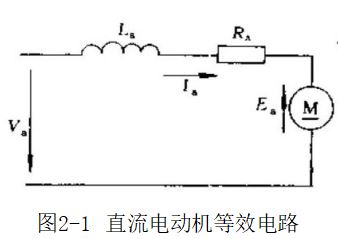
图2-1 直流电动机等效电路
时有一定的限流作用。电枢电感La对动态性能有影响,当电动机 以开关式驱动,例如,以脉宽调制方式驱动时,对电流脉动起平 滑作用。如果对直流电动机外施电压V, 其电压方程式为
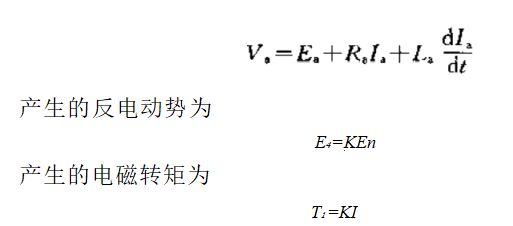
式中 KE 、KT—— 反电动势常数和转矩常数。
1.线性放大型驱动和开关型驱动方式 为了控制直流电动 机,需用半导体功率器件进行驱动。对于微小功率,数瓦以下的 电动机,常采用线性放大型驱动方式。如2.10节所述的小型收录 机的电动机驱动,功率器件工作于线性放大区,因此系统效率较 低。大多数直流电动机驱动集成电路则采用开关型驱动方式。其 中,又以定频脉宽调制 (PWM) 为常见。
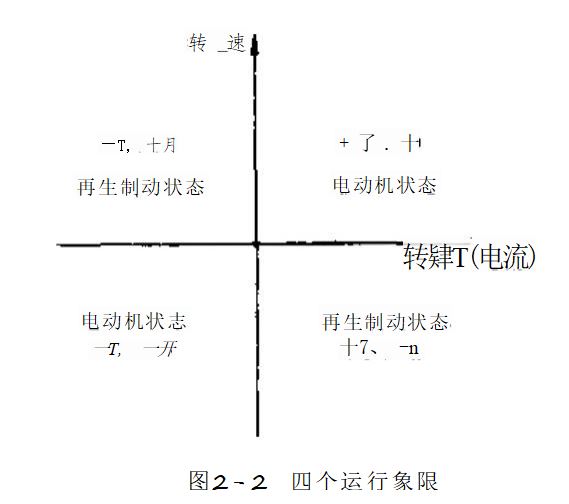
按照直流电动机转矩(电流)-转速图,可区分此种电动机的 四个运行象限,见图2-2。第 I 和 第I 象限是正转或反转电动机运 行状态,第IV和 第I 象限分别是正转或反转再生制动运行状态。由 于控制系统主电路结构不同和控制方式不同,可实现单象限、二 象限、四象限工作,和单极性、双极性工作方式。
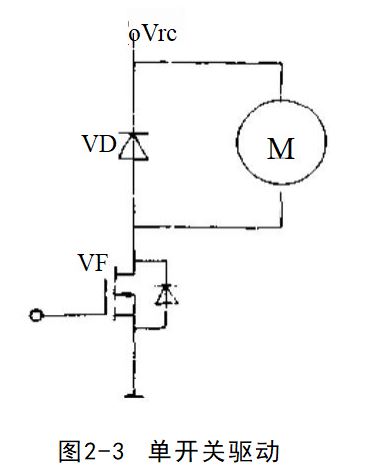
(1)单极性单开关管驱动:图2- 3所示的驱动电路,只需要-一个功率 开关管 VF 和一个续流二极管 VD。 当VF 导通 (ON) 时,电流上升。当 VF 截止(OFF) 时,电动机与二极管 VD 组成续流回路,在反电动势作用 下,电流续流并逐渐下降。改变开关 占空比,调节电动机端电压平均值 从而可进行调速。由于电流单向,转 速方向不变,故此电路称为单极性斩 波电路。它只在单象限工作 (I 或
象限),无制动状态。控制开关的PWM 信号可由TL494 等开关电源脉宽调制器集成电路产生。
(2)双极性H 桥驱动:若要求被控电动机可在双方向工作,即 能正反转运行,可采用T 型主电路或H 桥主电路驱动。T 型电路 是两个功率开关串接到两个电源之间(正电源和负电源),其中点 接电动机,电动机另一端接地,相当于半桥驱动方式。此种方式 在集成电路驱动中用得很少。
最常见的集成电路驱动双向工作的是H 桥方式。由于控制方 法不同,它又可分为两象限工作和四象限工作两种情况。
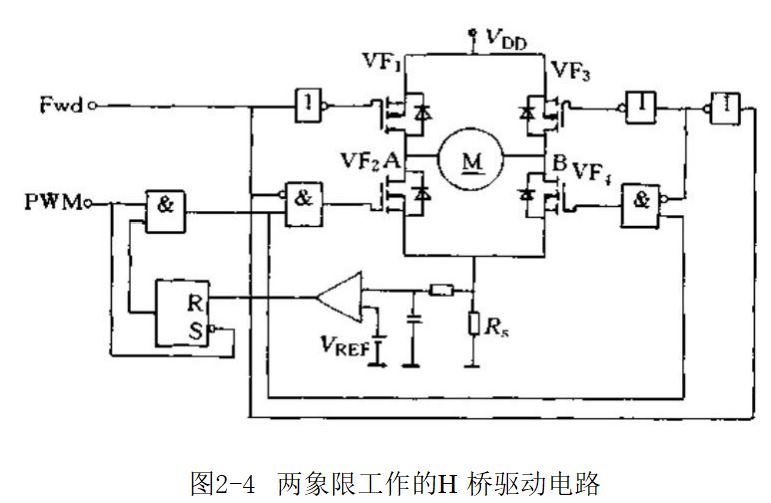
图2-4表示了一种两象限H 桥驱动电路。在此电路中,外来 两个控制信号:PWM 和 Fwd。由 PWM 信号调制下桥臂开关,而 方向信号Fwd 用来控制上桥臂两个开关。当Fwd 为高电平时, VF₃ 和 VF₂ 两个开关截止,VF, 导 通 ,V₄ 被斩波调制,电动机电 流从左到右。反之,Fwd 为低电平时,VF₁ 和 VF₄ 截止,VF₃ 导 通,VF₂ 被斩波调制,电流反向流过电动机。实际上,在正转或反 转情况下,与上述单开关管驱动相类似,没有制动状态。它工作 在第I 或Ⅱ象限。对这种方式,要注意一个问题,需要电动机反 转必须待转速降到零后,才能实施Fwd 改变的命令、否则会引起大电流出现,损坏功率器件和电动机,而且此大电流用图2-4所示 的限流方法不能奏效。安全的反转程序应这样:先将 PWM 信号 变为零电平,延迟一段时间,使电动机足以停下来,或对反电动 势进行检测监视,确实到零后,才改变Fwd, 再起动电动机。对 于像风机、泵类负载,用两象限工作比较合适,加速性能、效率 都比四象限工作方式要高。
对于有较大转动惯量、较小摩擦转矩、希望快速反转的场合, 适宜采用四象限工作方式。此时四个桥臂开关都被PWM 控制。动 态制动使电动机能快速反转。
从H 桥 PWM 控制的角度来看,通常按照四桥臂功率开关在 正向和反向驱动时的通断组合方式不同,分为双极方式、单极方 式和受限单极方式。
图2-4所示的H 桥结构部分,由四个功率开关和四个续流二 极管组成。双极方式的特点是四桥臂对角线两组开关分别控制, VF₁ 和 VF₁ 为一组同时导通或关断,VF₂ 和 VF₃ 为一组,也同时 导通和关断,在任一时刻最多只允许有一组是导通的。最简单的 控制是,在一个开关周期内,首先是第一组 (VF₁ 和 VF₄) 导通, 电动机两端A 和 B 施加正向电压,然后转变为第二组 (VF₂ 和VF₃) 导通,电动机两端施加反向电压。由此两种状态所占时间份 额多少决定平均电压是正还是负,平均电流是正向还是反向。当 两种状态相等时(1:1),相当于平均电压为零,电动机停转。双 极方式存在可能出现上下桥臂直通问题。为此两状态之间插入 “死区”状态,即短时间四桥臂都截止的状态。像 MC33030 的 PWM 控制那样,采用双比较器的窗口比较器产生对四桥臂控制, 实现带死区的双极方式PWM 开关控制。双极方式PWM 控制在 直流电动机专用集成电路中用得最多,例如后述的UC3637 、 L292、TAL955等。
单极方式PWM 控制是这样的:要正转时,将VF, 导通,VF, 和VF₂ 交替开关,由占空比决定正转平均电压;要反转时,改换 成VF₂ 导通,VF₃ 和 VF₄ 交替开关,由占空比决定反转平均电压。 分别观察在正转或反转两种情况工作时,电动机端电压的极性不 会改变,因此称为单极方式(参见SG1731 集成电路的说明)。
对于受限单极方式PWM 控制.在正转时,VF₄ 导通,VF, 和 VF₃ 截止,仅VFi 受 PWM 调制;在反转时,VF₂ 导 通 ,VF, 和 VF₄ 截止,仅VF₃ 受 PWM 调制。这样,上下桥臂没有直通的危 险。这种方式可靠性比较高,但没有制动状态,只可工作于I、
两个象限。这就是图2-4所示的工作方式。
2.速度控制与速度信号的检测 如上所述,利用专用集成电 路控制直流电动机,开环控制是简便的。通常向集成电路输入可 变指令电压,即可控制功率级输出给电动机的电压幅度,有些电 路甚至可输入带极性指令电压,可控制电动机正反转及其转速。对 于有电流环的电路,由输入指令电压可控制电动机输出正的或负 的转矩。L292 就是这样的例子。由于是开环控制,转速稳定度差。
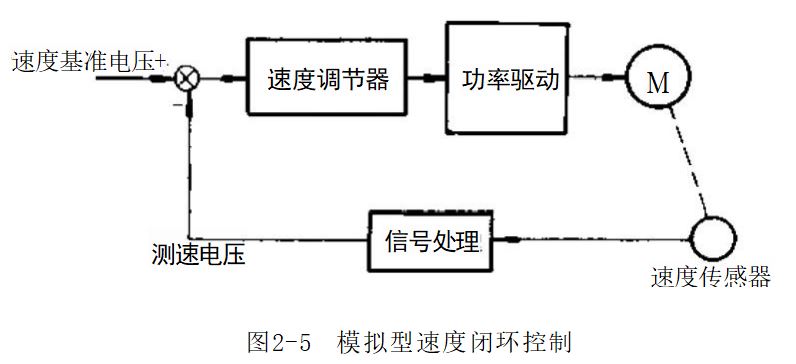
但是,大多数应用中还是要求被控转速有一定的稳定度,闭 环控制经常被采用。高精度的稳速闭环控制,其中之一是采用锁 相环控制技术,这部分内容在第4章中叙述。稳定度要求一般的, 例如士1%左右或以下的,通常应用模拟型速度闭环控制,典型框 图见图2-5。在这样的系统中,需要一个反映转速实际值的模拟量电压,它的幅值与实际转速成正比,极性反映转向。此测速电压 与代表给定转速的基准电压相比较,产生误差电压。后者经放大 和校正后去控制功率级,驱动电动机。闭环结果,使给定转速与 实际转速之差减小。这是传统的闭环反馈概念。现在已集成的专 用电路大多数包含了此反馈系统的主要环节。
在本章所述的应用专用IC 组成的速度控制系统中,速度检测 方法大体可分为两大类:
(1)模拟电压测速:它包括最常见的直流测速发电机。它给 出能反映转速大小和方向的双极性直流电压。对于对测速精度要 求稍低而注重考虑成本的场合,另一个办法是采用“测速桥”技 术。它的实质是从电路中检测出电动机的反电动势,因为直流电 动机反电动势与转速成正比关系(参见2.9节和2.10节的说明)。
(2)频率测速:用增量式光电编码器测速是常见的方式。它 的输出频率与转速成正比关系,再利用它输出的两个正交通道信 号相位关系可确定转向。其他相似功能的测速器,包括使用开槽 圆盘和光电接收器的光电脉冲发生器,用霍尔集成电路和钢制齿 轮构成的霍尔测速脉冲发生器,或结构简单的单相永磁交流同步 测速机等,这些统称为频率发生器(FG) 。这些FG 通常只给出单 通道频率信号,适用于单转向速度控制。在TDA7272 集成电路 (参见2.8节)中,利用少槽微型直流电动机电流中包含的转速频 率信息,将此交变分量分离出来获得测速频率信息。
通常利用F/V 变换电路将FG 频率信号变换成模拟电压信 号。目前有许多专用的高精度F/V 变换集成电路(如 LM2917 等),供用户选择。而在直流电动机专用集成电路中,例如 TDA7272 、M51970L 、TCA955 等使用FG 作频率式速度检测的 集成电路,内部已包含了一个F/V 环节。这些F/V 环节的工作原 理是利用FG 频率形成脉冲来触发一个单稳态电路,单稳态电路 输出一个脉宽恒定的,频率与FG 相同的脉冲方波信号,此信号占 空比与频率呈正比关系。此方波送入低通滤波器,经滤波后得到 的直流分量电压与转速成正比关系。在下一章无刷直流电动机专 用集成电路中介绍的MC33039 电子测速器,其中也包含由单稳 态触发器组成的F/V 变换电路(详见有关集成电路的说明)。
L290 转速/电压变换器集成电路的F/V 变换原理有独特之 处。它接收从增量式光电编码器送来的两路正交正余弦波形信号, 经微分网络、乘法器和加法器运算处理,得到有极性的测速电压 信号(详见第2,3节)。与由上述FG 单稳态触发器构成的F/V 变 换电路相比,L290 的转速/电压变换有明显的优点:
(1)输出电压纹波小,纹波频率是输入频率的4倍,可以采 用较小时间常数的滤波器,对系统带宽影响较小。
(2)转速检测快速性较好,使系统动态性能良好。作为对照 的,像TAL955 电路那样,为了解决低通滤波器带来的响应迟缓 问题,增加了一个预充电环节(详见此电路的说明)。
(3)输出电压极性反映了转向。因而可用于双向速度控制和 位置伺服系统。
3.保护电路 在直流电动机控制专用集成电路中,或多或少 地设置了一些保护功能电路,例如限流电路、欠电压或过电压保 护电路、输出短路保护电路、芯片过温保护电路等,以保障系统 能正常工作,保护本芯片及关键器件不受非正常工作损坏。
由于直流电动机自身特性,在起动过程或过载时,会出现过 电流。因此系统设置限流电路是首要的。如MC33030 、TDA7272、UC3637 、L292 等集成电路都有限流功能。其原理可用图2-4的例 子来说明。电动机负载电流流经R.,此电阻作为电流检测电阻,过 电流引起此电阻压降上升,在比较器中与预先设定的基准电压 Vre比较,超过此阈值后,比较器翻转,触发RS 触发器,封锁PWM 信号,使后面的H 桥四桥臂开关断开。待下一个PWM 信号前沿 到来,RS 触发器返回,电路才恢复。如果在新的 PWM 周期里, 电流上升又超过预定值,则再一次重复关闭过程。通过这种方式 可实现斩波限流。要注意的是,对于不同的电路结构,这样的电 流采样方式,也许不能检测出制动状态、电动机突然反转时出现 的过电流。此时,需另外设法检测和限流。
上述限流电路只是限制输出电流,因而只限制了电动机输出 转矩,而没有停机。另一种电流保护控制,是过电流停机保护。当 电动机过电流时,经过一段时延,如果过电流仍然存在,就会把 过电流信号触发RS 触发器翻转,封闭末级的功率开关,让电动机 停转。此触发器作为过电流记忆用。只有外界施加复位信号方能 重新起动工作。这里设计了一段时延,是为了避免因电动机正常 起动过电流而引起系统停止工作。显然,功率开关必须有短时耐 受起动过电流能力,这是要注意的。MC33030 集成电路采用了这 种过电流延时关闭的方案。
表2-1是各国半导体厂商生产的部分直流电动机控制、驱动 专用集成电路一览表。这些电路中,有些属于控制器电路,需外 接功率开关才能驱动直流电动机;有些已包含功率驱动部分,一 般驱动能力为0.5~2A(连续工作电流),它们已属于智能功率开 关集成电路范畴。其中三洋电气公司生产的STK 厚膜电路模块可 提供更大电流和功率。
表2-9还给出日本松下电子公司一些直流电动机控制集成电 路,表2-10给出收录机常用直流电动机稳速驱动集成电路主要技 术数据。
部分直流电动机控制专用集成电路一览表
型 号 |
厂 商 |
特 点 | 电压 /V | 电源 /A |
封装 |
MC33030 | MOTOROLA | 直流何服电机控制/驱动 器,开关式,PWM | 36 | 1 | DIP 16 |
SG1731 |
Silicon General |
H桥驱动,双路PWM |
士18 |
DIP 16 | |
SG2731 | |||||
*sG373] | |||||
L290 |
SGS | 测速信号转换 | 士15 | DIP 16 | |
L291 | 5bit DAC,位置放大 | 士15 | DIP 16 | ||
*L292 | 开关型驱动,H桥,PWM | 36 | 2 | 15个引脚 | |
TDA7271 | 高性能,速度控制,H桥驱 动,限流 | 18 | 1 | SO 20 | |
TDA7272 | 高性能,速度控制,H桥驱 动,限流 | 18 | 1 | DIP 20 | |
TDA7274 | 速度控制 | 3 | 0.7 | DIP 8 | |
TDA7275 | 盒式磁带机用 | 16 | 1.5 | DIP 8 | |
TDA1041 | 永磁DC电机调速 | 20 | DIP | ||
TDA1151 | 永磁DC电机调速 | 20 | TO-126 | ||
TDA8115 | 双电机驱动、单向,限流 | 28 | 1 | 7个引脚 | |
TCA955 | Siemens | 速度控制,双向,电平指示, | 6 | DIP 16 | |
12350 |
Telefunken | 永磁DC电机速度控制 PWM |
15.5 |
0.25 |
DIP |
U2351 | |||||
*UC1637 |
UNITRODE |
开关式控制/驱动器,H桥 pWM,两象限 |
士20 |
0.1 |
DIP 18 |
UC2637 | |||||
长liC3637 | |||||
*AN6657/S | 松下 | ||||
EL2036 |
Elantec | 伺服驱动器 | 5 | 1 | S020 |
EL2037 | 饲眼驱动器 | 5 | 1 | S020 | |
EL2007 | 精密伺服驱动,B或D级工 作方式 | 20 | 1 | DIP 24 |
型 号 |
厂 商 |
特 点 | 电压 /V | 电源 /A |
封装 |
EL3036 |
Elantec | 精密伺服驱动,B或D级工 作方式 | 5 | 2 | SO 20 |
EL3037 | 精密伺服驱动、B或D级工 作方式 | 5 | 2 | SO 20 | |
EL3038 | 精密伺服驱动,B或D级工 作方式 | 5 | 2 | SO 20 | |
*M51970L |
三菱 | FG伺服控制 | 9 | SIP 8 | |
*M51971L | FG伺服控制 | 9 | SIP 8 | ||
M54543L | 双向驱动器,制动功能 | 12 | 0.3 | SIP 9 | |
M54544L | 双向驱动器,制动功能 | 12 | 0.3 | SiP 9 | |
M54546AL | 双向驱动器,制动功能 | 12 | 0.15 | SIP 10 | |
M54549AL | 双电机,双向驱动器,制动功 能,热保护 | 12 | 0.3 | SIP 12 | |
M54641L | 双向驱动器,制动功能 | 10 | 0.15 | SIP 8 | |
M54644BL | 双向驱动器,制动功能,热保护 | 16 | 0.6 | SIP 9 | |
M54649L | 双电机,双向驱动器,制动功 能,热保护 | 12 | 0.6 | SIP 10 | |
M54685L | 双向电机驱动器,调速 | 6 | 0.2 | sJP 10 | |
M54687FP | 双向电机驱动器,调速 | 9 | 0.2 | SOP 16 | |
LA5527 |
三洋 | 调速,驱动 | 3 | 1 | DIP 6 |
L.A.5528 | 调速,驱动 | 3 | DIP 8 | ||
LA5540 | 调速,驱动,制动,小型打印 机用 | 20 | 2 | SIP 4 | |
LA5550 | 双向,驱动,调速,制动 | 6 | 1 | DIP 16 | |
STK6103 | 双向驱动,低饱和电压 | 50 | 5 | SIP 28 | |
STK6105 | 双向驱动,低饱和电压 | 50 | 8 | SIP 28 | |
STK6215 | 双向驱动,PLL控制 | 52 | 12 | SIP 23 | |
STK6217 | 双向驱动,PLL控制 | 52 | 18 | sIP 23 | |
STK6855 | 双向驱动,制动,PWM | 50 | 5 | SIP 16 |
型 号 |
广 商 |
特 点 | 电压 /V | 电源 /A |
封装 |
STK 6875 |
三洋 | 双向驱动,制动,PWM | 50 | 12 | SIP 16 |
STK 6877 | 双向驱动,制动,PWM | 50 | 18 | SIP 16 | |
STK 6965 | 双向驱动,制动 | 35 | 4 | SJP 10 | |
STK 6966 | 双向驱动,制动 | 35 | 6 | SIP 10 | |
TA 7267BP |
东芝 | H桥驱动,正反转、制动控 制,过电流过热保护 | 18 | 1 | SIL 7 |
TA 7257P | H桥驱动,正反转、制动控 制,过电流过热保护 | 18 | 1.5 | SIL 7 | |
TA 7279P | 双H桥,驱动双电机 | 18 | 1 | DIL 14 | |
TA 7288 | 驱动双电机,输出电压可调, 过热保护 | 25 | 1 | SJL 10 | |
TA 7291P | H桥驱动,输出电压可调,过 热保护 | 25 | 1 | SI 10 | |
TA7256P | 双功率运算放大器 | 士18 | 1.2 | DJL.16 |
随便看看
- 2024-11-19YCY14-1B型泵的构造
- 2024-09-20柴油机电子控制系统内容及功能
- 2024-09-13电瓶的操作注意事项-挖掘机安全使用维护手册
- 2024-09-19压力继电器-液压传动基础知识
- 2024-11-06空气流量与发动机功率之间的关系