
生物中的分散
生物,从漫长的自然淘汰史中生存下来这种意义上看,它是一种高度完善的机械。当然,正象基于模仿鸟的翅膀,人们发明了飞机那样,生物的一切构造都是可以模仿的。控制论的一个基本出发点恰好寓于生物体内,因而可以设想,从生物信息方面,是能够学习到很多东西的,鉴于这种认识观察生物,就不难看出生物中的分散是一种白然的构造。图6.22(a)是人的脑中枢神经系统示意图,通常,从接收器(感觉器官)得到的信息,通过上行传导路线传到大脑皮层,相反从大脑传过来的产生运动的信号,通过下行传
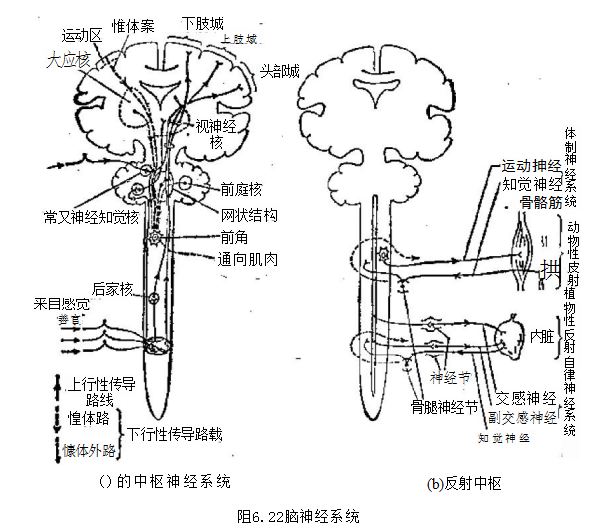
导路线到肌肉等动作器官,就这一部分而言,动物具有集中型系统构造。从创造学的观点来看,这是一个新的内容,它是人类生存所必须的最低限度的信息处理,显然是有很大局限性的。
最具有代表性的行为是反射。所谓反射是通过知觉神经传来
的兴奋信号,在中枢神经内某处(反射中枢)进行转换,从而表现出传达到运动神经后的现象。例如,在四肢的皮肤上扎针,于是被扎的肌体就要本能地躲避,并且产生屈体运动,这又称为屈肌反射或自卫反射,实际上,即使产生一次反射,也必须进行复杂的肌内协调运动,因此在反射中枢神经内,必定要进行大量的信息处理,这种反射叫做动物性反射。另外如图6.22(b)所示,还存在有象出汗,呼吸运动反射和心脏运动反射等植物性反射。虽然高等动物也许不能这样生存,但是,对于低等动物,只要有反射就基本上能够维持生命活动。这种构造叫阶层型系统。
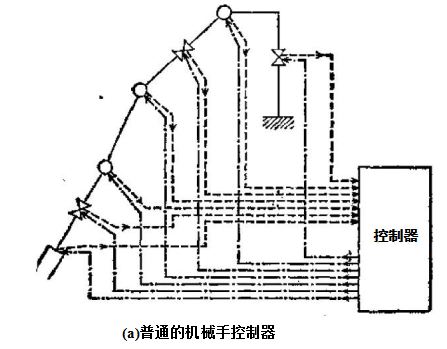
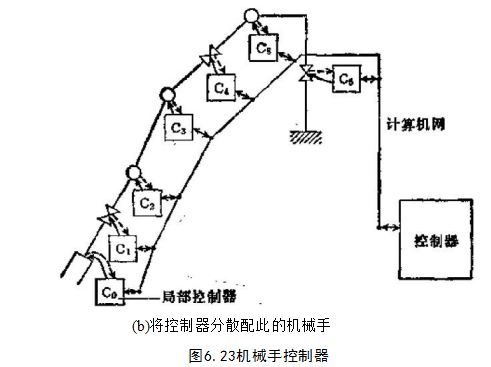
图6.23是根据动物性反射的模拟,将控制器分散到机械构造内部的机械手的例子。普通的机械手如图6.23(a)所示,机械手本身在与计算机完全分离的地方,两者用信号线(电缆)连接,执行动作指令。因此,随着执行器和传感器的增多,必须引出非常多的电缆线。对机械来说,由于零件的相对运动是实现机械功能不可缺少的,所以完全避开大量的电缆引出是不可能的。总之,从电子电路角度看认为是最不希望作的事情,在机械电子学中却是必须进行的。最简单易行的解决方法是将相对运动的零件间的布线集中起来,以图减少导线数目,提高可靠性。例如图6.23(b)所示的构造,就是基于这种考虑得到的。正如刚才所叙述的那样,在各个关节上装上计算机和放大器,于是局部的问题就可以全都在这里解决了.
低位控制器C₀—C₆,担负着关节角控制的全部任务,它是一个具有4K字节的ROM、128个字节的RAM和125Kbps的串联通信线路(总线型网络)等的CPU芯片。这里可以实施各种模式的位置、速度和力的控制。另外在动态控制方面,如果利用每个关节的运动方程式按递推方式求解1,并且按流水线型使用六个CPU,这样就可能达到极为高速的力控制。近年来,随着电子器
1)Lath,J.er.al:On-lineComputationalSchemeforMechanica1Msni-pulatora,JoxrnolofDy#amicSystems,Mear#rene排FandCo#rol,Vol.102(19—80),p,69.
件的迅速小型化,这种控制器的结构巴经开始成为现实。
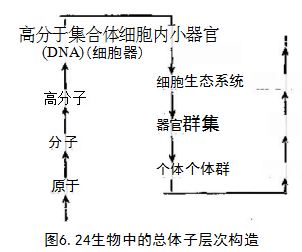
此外,还可以进一步地探讨在低位一级的分散问题。众所周知,虽然大多数生物是由很多细胞组成的,但是,这些细胞在某种条件下也可以单独生存,也就是说,细胞在作为生物整体的组成元素的同时,它还可以依据自身的生存规律单独存在。更进一步说,如图6.22所示,生物具有上下无限延伸的层次构造,细胞也是如此,各等级的存在将整体性和从属性结合在一起。A,Koestler称
这种存在体系为总体子(总体子holon=hol(总体)+on(粒
子))。
从本质上讲,总体子具有如下特点,即其单独存在时与其以集合形式存在时比较,具有不同的特性。我们把总体子集中后,形成高位秩序的过程,称为协同现象。总体子只有在集中后才表现出协同动作。
例如我们看到的蠕形原生单细胞动物的纤毛运动就是典型的协同现象的例子。如果单个地去看每一个纤毛,它只是在作一种任意的运动,但是如果将它仍并列成一排去看,就可以看出它们是在作着协调的划水动作。虽然对它的机理还不太了解,但显然纤毛具有水流传感器,根据纤毛对水流的统一步调,实现在整体上协调运动。总之,基于水流这一宏观信息,就会自然地从整体上统一
1)石井威望任力:自律分散型二fv-Bの開発,第二回日本口少卜学会稍演会,p.25.起来。在实现这种协同动作的过程中,存在着由大自然赋于的某种“场”,这种“场”是不可缺少的,在6.2.3节中涉及的统一输入,从工程的意义上也可以考虑为一种场的体现。
下面再举一个例子。细胞的分裂及繁殖情况下的控制结构是极为分散的。因为这里不存在控制中枢,所以,显然不能控制这一现象。作为细胞模式的形成模型,经常引用由L.Wolpert提出的“法国国旗问题”模型。这一问题如图6.25所示,它是一段长度有限的细胞集合,其中左边1/3是蓝色,中央I/3是白色,右边1/3是红色,把形成这一模式的机理抽象化以后,就可以得到某种蓝藻类,模式形成的简化模型。此时即使细胞集合的长度发生变化,其模式也不会变化,而且必定会显示出相似的性质。这里是根据什么原理来保证细胞集合的统一行动呢?Wolpert认为这种形态的形成,是在细胞辨认了自己的所在位置后,据此决定分解出何种颜色。
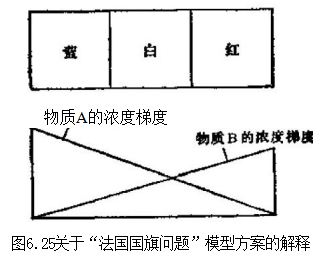
在辨认位置的过程中,细胞的位置“场”起了重大作用。特别是在形成1mm大小的模态时,多数从事实验工作的专家都认为,扩散性的某种化学物质(例如甾体激素)的浓度梯度形成了一种场。即使对于“法国国旗的问题”,如图所示,也存在两种梯度,如果以所具有的两种浓度比作为位置,则称其为与细胞集合尺寸无关的场信息。
一般认为机械电子机器将朝着复杂化、分散化方向发展,为了把许多CPU或处理过程统一起来,生物的协同现象肯定会对我们提供有益的启示。在这方面虽然生物分散构造与工程学系统有密切关系,但这里还必须强调指出,两者之间存在着很大区别,对于前者,其高位的存在是作为低位存在的集合而存在的,而不是单独存在的。低位存在的场所是统一的,统一的程序分散在低位的存在之中。作者认为,只有这一点才是生物设计中具有决定意义的优点。细胞的集合构成为器官,但是许多细胞与别的器官并存显然没有什么意义。
应当强调指出,在以前讲过的系统中,可以认为CSMA/CD的分散型总线管理系统是最接近它的设计,但是为了积极地从设计上引进这种协同现象,肯定地说现在的知识是不够的,但是在探讨以上内容时,我们看到生物中这种非常大规模的分散型构造,作为将来的控制系统的构造,是有着极大吸引力的。可以设想,今后它将成为应该进行深入研究的课题之一。
随便看看
- 2024-12-11液压油的合理选用
- 2024-09-14定期更换重要部件-挖掘机点检整备篇
- 2024-11-14JBZ-01B型泵的装配
- 2024-09-19液压传动中的其它物理现象-液压传动基础知识
- 2024-11-04电液伺服缸