
连续系统和离散系统的模型化
价格低廉、使用方便、体积小巧的微型计算机,使机械设备的状况发生了巨大变化。这时,模拟装置转变成了数字装置,硬件转变成了软件,机械元件也发生了变化。机械电子学不是机械与电子技术的简单组合。发展到现在,从由物理的“东西”构成的机中,加进软件这一点来看,它可以被看作是一种新的技术。总之,利用软件显然可以对信息进行处理。与此对照,在以前的机械中,信息也是物理机械的一部分。
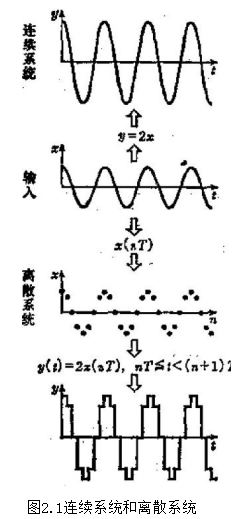
在采用微型计算机以前,机器内部的信息处理,是依靠由晶体管组成的模拟电路,和以调速系统为代表的机械模拟回路来实现的。在这类系统中,状态是连续变化的,故称之为连续系统。与此相反,当用计算机进行信息处理时,处理结果变成了不连续的(离散的),如图2.1所示。内部包含这部分内容的系统,称为离散系统。但是,当处理速度非常快时,可以把离散系统看作连续系统,通常,连续系统的数学模型可以方便地用微分方程描述,而离散系统的数学模型,则可以方便地用差分方程描述。
现在我们用一个简单例子,说明一下上述情况。在图2.1所示的情况中,按正弦规律变化的量x为输入量,以两倍x作为输出的连续系统,其输出为y=2x。在功能与此相同的离散系统例子中,计算机每经过时间间隔T,录取一次x(t)的值,以录取值的两倍作为输出的情况,也在图2.1上表示了出来。
状态方程式与观测方程式
下面我们举一个稍微复杂的例子。图2.2表示的系统是一个由电动机产生的转矩v驱动质量为m的质点
的例子。因为电动机产生的转矩r与输入电流*成正比,故有
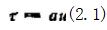
若设轮盘的半径为r,则加到质点上的力F为
此外,质点的运动方程式为
加一F(2.3)
将(2.1)式,(2.2)式代人(2.3)式,则可以得到描述质点运动的方程式
如果知道了质点的位置x,要测定轮盘的旋转角度y,则可以利用公式

输入电流x与输出y的关系,可以由(2.4)式和(2.5)式组成的微分方程式得到(连续系统情况)
其次,考虑在同一个图2.2上,若计算机以T为时间间隔对y 进行采样,同时将计算结果作为#进行输出的情况(离散系统情况)。即使在这个例子中,从到y这一部分仍然是一个连续系统而不会发生变化。但是与用计算机进行处理的离散时刻kT对应的控制量w(k)和采样数据y(k)则都是离散的。我们约定,以后在没有特别指明时,w,y,(t),y(t),…·均表示关于时间的连续量,而w(k),y(k),.(k=0,1,2·…)则表示在采样时刻AT时的py的值。此外,所谓连续系统和离散系统这样一些术语,其着眼点在于整个系统的性质,像这个例子中,虽然局部系统是连续的,但全体系统则是离散的,这点也必须注意。
只着眼于研究采样时刻kT时的状态时,则系统的动特性用差分方程式描述.例如,控制量w(k)可以由y(k)确定(当然,根据y(k一1),··也是可以进行计算的),当kT≤t<(k+1)T,u()=u(k)一常量时,则对应于时刻kT及(k+1)T的(2.4)式的解满足下列关系式;
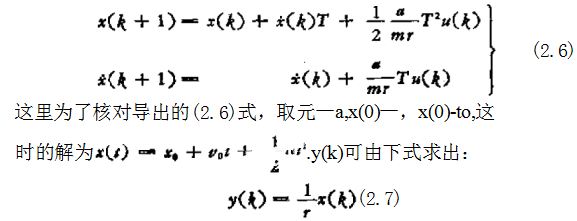
如上所述,连续系统状态的动特性满足方程式(2.4),离散系统状态的动特性满足方程式(2.6)。此外,测定量满足(2.5)式和(2.7)式,我们称(2.4)式和(2.6)式为状态方程式,称(2.5)式和(2.7)式为观测方程式。
状态变量和状态向量状态方程式和观测方程式可以用下面统一的方法加以表示。
因为连续系统的状态方程式(2.4)是二阶微分方程式,所以它与下列一阶联立微分方程式是等价的。这里*1对应于x,x:对应于。(当然,等价的联立微分方程式不只是(2.8)式一种。)
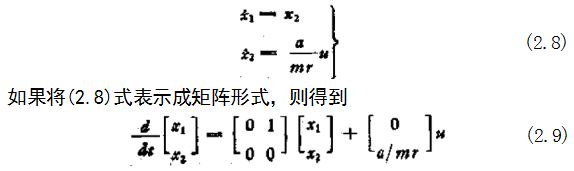
x中的各元素叫做状态变量,x叫做状态向量。
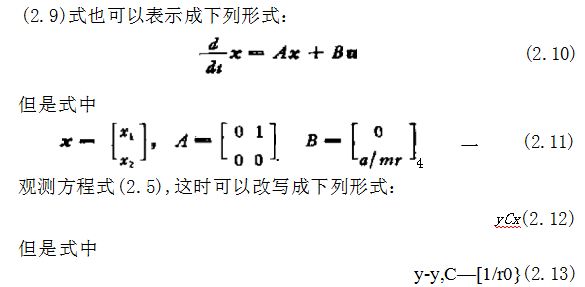
若用矩阵来表示离散系统的状态方程式(2.6)和观测方程式(2.7),则变成下列形式:
x(k+1)=φ(T)x(k)+H(T)a(k)(2.14)
y(k)=Cx(k)(2.15)
但是式中

(2.14)式也可以直接从(2.10)式求得。
如果微分方程式(2.10)满足条件:1一tT时x=x(k),kT≤<(k+1)T时u(t)=a(k)=常量,则应用2.1.2节中得到的结果,(2.10)式在kT≤1<(k+1)T时的解为
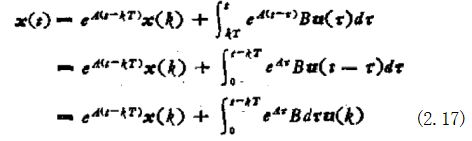
因此,若考虑时刻x=(k+1)T则得到
上式中符号“”表示转置。另外

正如前面定义过的那样,这里的x₁,…,x。称为状态变量,x称为状态向量,(2.20)式称为状态方程式,(2.21)式称为观测方程式。
当(2.20)式和(2.21)式右边相对于x,u呈线性关系时,或者在解的附近线性化时,(2.20)式和(2.21)式变成为下列形式:
x=A(t)x十B(r)u
y=C(r)x
但是,当在解x*(t),u*(t),y*(1)周围线性化时,则有
并且分别设x一x*,u一a*,y-y*为新的变量x,t,y.
另外,如果在(2.24)式及(2.25)式中不出现t,即最后使A(r),B(t)及C()变成为常数矩阵时,(2.24)式及(2.25)式则变成=Axy=Cx
其中A为n×n矩阵,B为n×r十Bu矩阵,C为m×n矩阵。在第二章和第三章中,主要以(2.27)式及(2.28)式表示的系统为中心,进行讨论,状态方程式的解连续系统(2.27)式和(2.28)式具有下列重要性质、对于n×n常数矩阵4和实数,定义下式为矩阵指数函数eAt:

式中I为单位矩阵。(2.29)式右边逐项微分后,同样能收敛到Aedt.如果利用这个矩阵函数et,则式
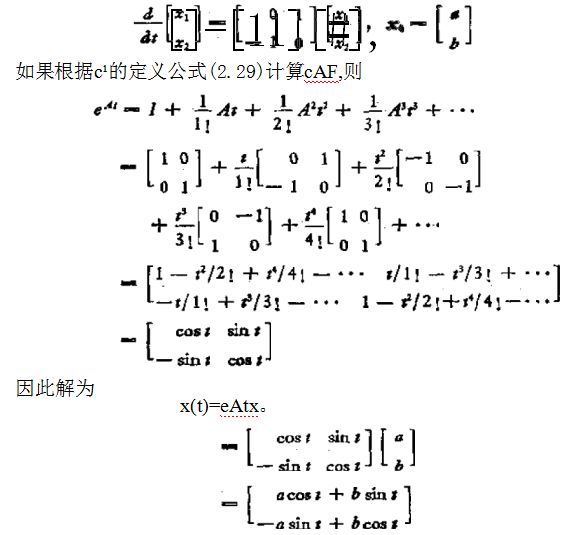
现在让我们应用这个结果,实际求一下状态方程式的解。例如,对于简谐振动=-x,x(0)=a,≠(0)—b,若设x₁x,x₂=,则可以得到矩阵微分方程式
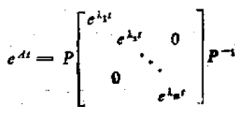
其次,我们下面介绍另一种求e的方法。当利用正则矩阵P能使矩阵A对角化时,即当
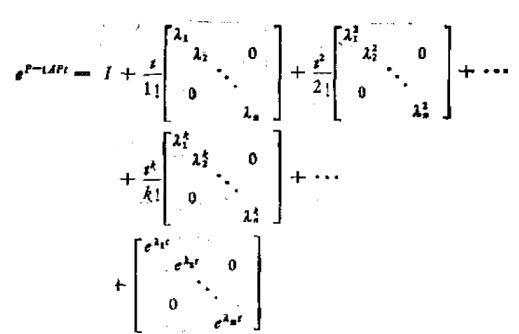
因此可以求得cAt
(即使矩阵A不能对角化,如果将:P-¹AP变换成若当(Jordan)标准形,也同样可以按照上述方法进行讨论。)在上面的例子中,
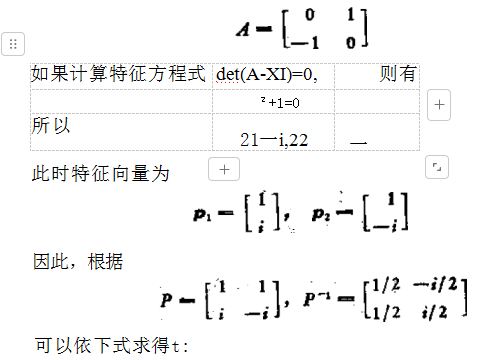
值得注意的是,即使这里的特征值和特征向量为复数,e的诸元素也将会变成实数。
解的稳定性在(2.30)式的解(2.31)式中,对于任意的x,当t→0时,如果x→0,则称为渐近稳定,如果x是发散的,则称为不稳定。当A矩阵可以实现对角化,因而e能够表示成
显然,使(2.30)式的解渐近稳定的条件是λ:的实部应为负值,即R.(2;)<0(i一1,·,n)
用x—Pw对(2.30)式进行变量代换,可以得到i一p-¹4Pw,从这个结果出发,经过下面的推导,也可以得到上述稳定条件。对于正则矩阵,当P-¹AP可以实现对角化
时,对于w—[w₁0z·w.]',下列等式是成立的:
因为P为正则矩阵,所以x→0与w→0具有同样意义,而四→0的充分必要条件是w;→0(i=1,·,n)。因为λ,一般为复数,所以保证w₃→0的条件便是λ;具有负实部。总之,保证(2.30)式渐近稳定的条件是A的特征值全都具有负实部。即使P~AP不是对角阵,如果采用若当(Jordan)标准形,也能得到同样的结论。
如果利用c,则满足初始条件x(0)一x的(2.27)式的解,可以表示为下列形式:

如果对上式两边微分,就能够清楚地证明这个结果。
冲击响应在微分方程(2.27)中,许多问题是针对特殊输
入信号a(t)进行求解的.对于a=[A₂ | ;··]',当初始值x≠ |
0,且n一0(j≠i),w=8(t)(i-i,8(1 | 为8函数)时,称状态x |
对内的响应为冲击响应。因为对δ(t),式

成立,所以由(2.34)式求得的冲击响应变为
x(t)=B[0…010…0](项元素为1)(2.36)
因此,分别对41,M₂,…,的,求冲击响应(2.36)式,显然从左方顺次排列的项也是eiB.
随便看看
- 2024-09-14旋转要领-挖掘机驾驶操作篇
- 2024-09-18电路基础-工程机械电器系统
- 2024-09-20日立故障代码0041-04:8V直流电源和接地短路
- 2024-10-23执行器的介绍
- 2024-11-07发动机涡轮