
触觉和力感觉
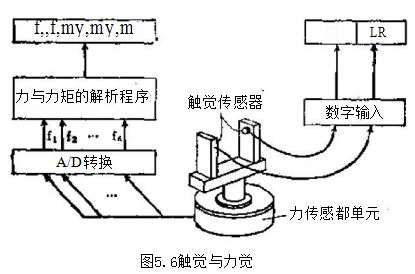
假想机器人的手是两指平行开闭的,且在各指的内侧装有触觉传感器。关于触觉的功能,它具有get-touch-sensor.根据get-touch-sensor(L,R),左右指尖触觉的“ON·OFF”信号被读取,并记入变量L,R.在假想机器人的手腕部,考虑装入6轴力觉传感器。关于力觉功能,备有get-wrist-force(fx,fy,f,m,my,m,).根据这个功能,手腕部的力觉传感器的信号被读入,并计算在工具坐标系中的X,Y,Z方向的力f,fy,f.以及各轴转动惯最mz,my,m
之后,记入变量(参考图5.6)。
随便看看
- 2024-09-12禁止危险作业-挖掘机安全使用维护手册
- 2024-10-12辅助动力控制回路
- 2024-09-19齿轮液压马达-液压传动基础知识
- 2024-09-20卡特C系列挖掘机的发动机故障代码表
- 2024-11-12防止液压油温过局