
视觉子系统
作为机器人视觉的输入装置,一般采用内部装有摄像管或固态摄像元件的电视摄像机。扫描画面之后,将所得到的画面信号进行量化,构成数字图像,然后根据计算机的处理,进行各种视觉上的识别。关于视觉,目前已进行了大量的研究,图像处理的方法、识别对象都极为广泛。一般,多是通过对识别对象的限制,去研究面向某个特定问题的高效率处理方法。因为视觉包括的内容过于广泛,所以确定一个能够对应于所有范围的综合功能集是很
困难的。因此,本节中作为假想机器人的视觉,我们假定是识别一些比较简单物体的形状和位置,并且以二值图象平面图形处理功能为中心,规定一个小功能集。
机器人的视觉,不仅要识别对象物的形状,而且为了操作这些对象,还要求对对象物的位置和姿势进行识别.假定假想机器人的臂被限制为四个自由度,且只考虑对放在平面上的物体进行操作这样只要考虑假想机器人的视觉具有从上往下看的形式,即考虑所谓2.5维空间的视觉系统就可以了.为了确保2.5维空间的距离测最功能,我们假定在假想机器人的视觉中,完成了乎面图形的物体识别之后,采取激光-光点-扫描器和二值图像处理并用的三角测量原理来进行距离的测定,
二值图像与扫描宽度代码在图像处理系统内,是将矩形的视野分割成网格状,并以各格子点的明暗度作为元素,然后以二维阵列来表示图像。阵列的大小为256×256或512×512.我们把各格子点称为像素。按照比某个门限值是亮还是暗这样一个位信息来表示各像素值时,就称其为二值图像,即:
B={b}}bj;=1或0
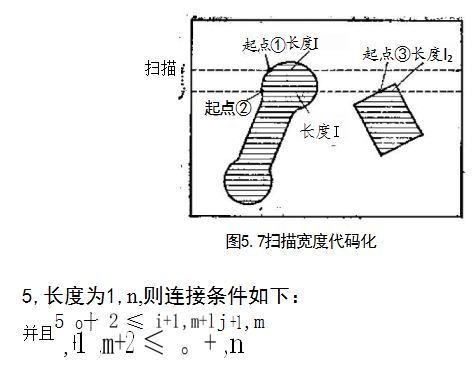
虽然也有直接对二值图像进行图像处理的手法,但为了在压缩数据的同时提高处理速度,一般多采用被称为担描宽度的符号化法。在扫描宽度代码中,沿着扫描线,具有“1”值的像素有两个以上连续出现时,就用起点和“1”值的连线长度来表示。例如:若在行方向上扫描图5.7那样的图像,则可求出物体的断面,即应表示成如下形式,
(扫描号i),(起点①),(长度,);(扫描号i),(起点②),(长度1),(起点③)(长度4);
长度为1值的连线被看成噪声而不进行代码化。
连接性的分析我们考虑一下将经过扫描宽度变换后的数据,按各图形数据进行分组的情况,当相邻两行中的扫描宽度数据具有两个像素以上的共同部分时,可以认为这些数据是连接在一起的数据,设由第主行的扫描而得到的第#个扫描宽度的起点为
根据对扫描宽度数据间的连接性的分析,可以把扫描宽度的数据按每一个独立存在于图像中的图形分组。
图形的基本特征描述符可以用各种参数组合的方法表示乎面图形特征。目前在商品化的比较简单的视觉装置中,计算各种图形特征描述符的值,并用其组合后的参数对对象物进行识别的方法较多。下面我们以被称为SRI视觉的系统为依据,例举其代表描述符。
(1)图形中的孔数N.
(2)图形中的面积S.
(3)图形中的周长L.
(4)图心位置(X,Y,)。
(5)最大半径Rmax:从图心到各个周边点距离中的最大值。
(6)最小半径Rma:从图心到各个周边点距离中的最小值。
(7)平均半径Rm.m:从图心到各个周边点距离中的平均值。
(8)最大半径与X轴(水平方向)的夹角cmx.
(9)最小半径与X轴(水平方向)的夹角m
(10)等效惯性椭圆的长径Major.
(11)等效惯性椭圆的短径Minor.
(12)等效惯性椭圆的长径与X轴的夹角β。
(13)具有与慢性主轴平行边的外接长方形,其长边及短边的长度分别是Length和Width。
(14)图形的X与Y轴方向投影的最大值及最小值:XmaxsXla,Ymx,Ymin
根据形状因子的图形识别在预先知道识别的对象物时,可以根据基本特征描述符的各种组合,定义对对象物进行分类的参数。这些参数称为形状因子,作为简单例子,我们来考虑有关圆,六边形及正方形的分类。这时,作为形状因子,如果考虑图形面积与外接长方形面积之比(S/Length·Width),及外接长方形的短、长边比(Width/Length),则根据这些形状因子的值,就很容
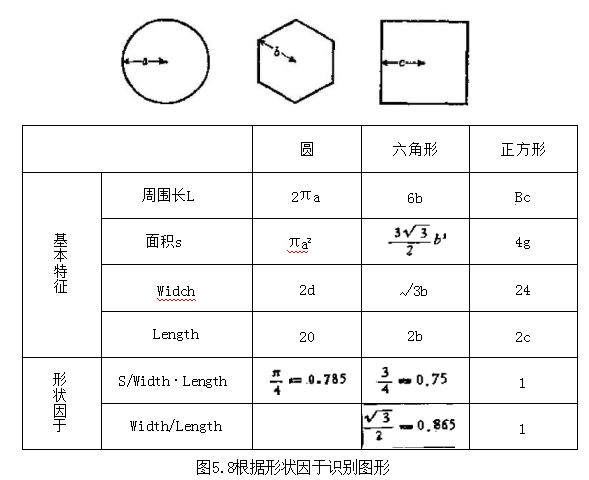
易对上述3种图形进行识别。我们将这种情况的基本特征描述符
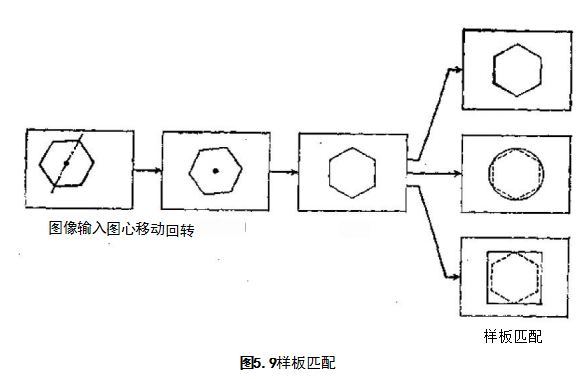
话,则比较的效率就可以提高,例如在图5.9的场合中,首先将输入图像中的图心,平行移动到图面中心,其次,让图像旋转到惯性主轴呈垂直状态,最后与三种样板进行比较。最简单的比较方法是利用异或运算,由此结果,根据所得到的不一致像素的数目,即可决定与哪一个样板匹配。
在机器人的视觉中,当识别物体之后,为了处理该物体,有必要知道该物体的位置与姿势,图像内的物体位置可以根据基本特征算子的图心位置及姿势,按照惯性主轴方向决定。
摄像机坐标向绝对坐标的变换视觉系统中的识别结果,是以设定在摄像面内的直角坐标中的位置给出的,机器人为了操作物体,有必要进行从摄像机坐标到绝对坐标的变换。如图5.10所示,设摄像机在作业领域中的设置方式,是从正上方往下看的,并设摄像机坐标系公的原点与镜头申心一致,摄像面虽然实际上位于镜头后方,但为了很好地进行几何学分析,可以考虑把它移动到与镜头对称的前方位置。摄像面上点V(,y.)的成像物
体,位于Ov的延长线上,为了决定三维空间的位置,因为一个约束条件不够,所以引进一个假定条件,即假定物体(4点)位于离作
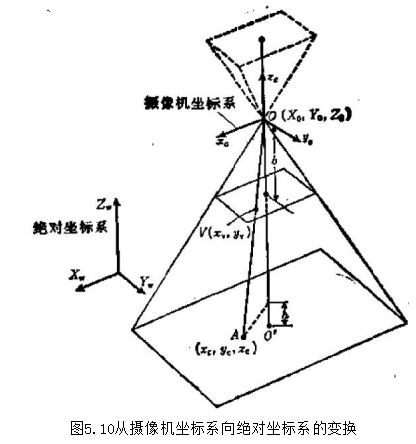
业台高度为后的面内。设摄像机坐标系中物体的坐标为(x.,y,),并设绝对坐标系的XY平面与作业台表面一致,摄像机坐标系的原点为(X,Y,Z₀),绕Z轴的旋转角为a.因为已假定了A点比作业台高h,所以=-Z₀十h,即得到
x=。·(Z。一A)/b
y.一y,·(Z。一h)/b₅—Z₀+h
两坐标系的关系为
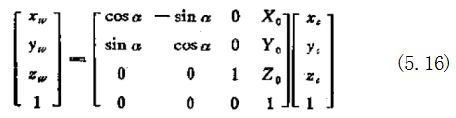
若将(5.15)式代入上式的(xe,yosz),则可求出等效摄像面上的像(x,y.)的绝对坐标。为了简单,设α-0,则得到
xw=x,·(z,—h)/b+X,
yw=y,·(z。一h)/b+Y。(5.17)
2=
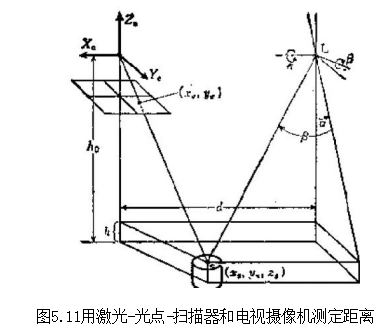
距离的测定仅用一个电视摄像机,是无法测定三维空间位置的。因此,我们考虑采用被称作激光-光点-扫描器的装置与电视摄像机的组合,进行三维空间位置的测定。激光-光点-扫描器是通过控制两片小反射镜的倾斜角实现向任意方向照射激光的装置。用电视摄像机测定激光碰到物体时产生的小光点的中心位置。如果知道光线照射角与电视摄像机的摄像面上的光点像的位置,则根据三角测量原理,可以计算出照射到物体表面上的光点的三维空间位置。
为了使计算简单,我们让激光-光点-扫描器和电视摄像机如图5.11所示那样安放。激光光束从点L按角α,β的方向照射。点L在摄像机坐标系的XZ平面上,摄像机坐标系的原点和激光光束的照射点L,被设置在与作业台同样高度的地方。设光点的三维空间位置为(x.,y,z),电视摄像机摄像面中光点的位置为(xsyo),摄像机坐标系的原点离作业台的高度为h,光点的高度为h,则
x,=t,·(加—A)/by,=y,·(h一h)/bz,=—A十h
(5.18)(5.19)(5.20)
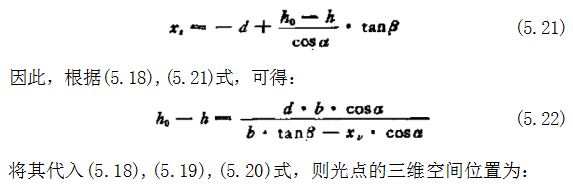
若按图5.11所示决定激光照射角a,β的话,则光点的X坐标可用
a,β表示如下:
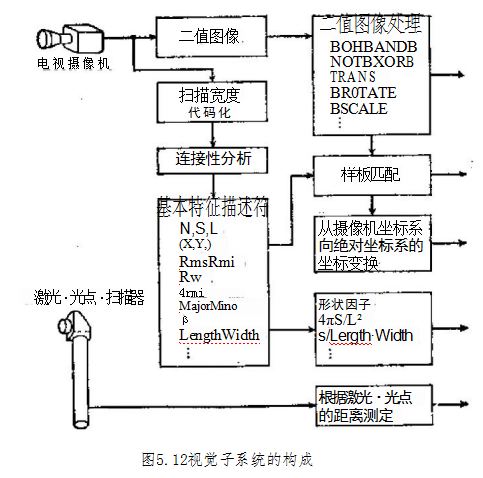
视觉系统的构成假想机器人中的视觉系统是由下面各部分构成的:用扫描宽度代码化数据的基本特征描述符的计算,根据形状因子识别物体,二值图像处理函数,样板匹配,绝对坐标系中物体的位置和方向的识别,用激光-光点-扫描器与电视摄像机测定距离等,图5.12表示了视觉子系统的大致内容。
作为关于视觉的功能集,我们先规定以下四种:
get-descriptors(descriptorlist)从电视摄像机输入图像,计算上述14种图形特征描述符的值。
template-matching(templatelist.result.x.y、φ)进行由templatelist所指定的对样板的模块比较,将比较拟合得最好的样板的名称放到result中,将其中心位置和角度放到x,y,中中。
calculate-world-coord(x,y,φ,,xm,y,αw)把对样板
的模块比较得到的对象物的中心和角度(x,y,φ)变换成绝对坐标(x如,y,a).然后对对象物的高度h进行坐标变换,即在该功能的变量中,常,y,φ是输入,h是参数,x,y,a,是输出。
get-spot-position(α,β,x,y,z)让激光光束按,β角照射,计算碰到物体后产生的光点像的三维空间位置,然后将其值送回到,y,z
作为视觉系统的基本功能,除上述以外,虽然我们还介绍了图形的逻辑运算,图形的移动等,但是为了取得与其它子系统的平衡,本章首先只定义了上述四个功能。
随便看看
- 2024-09-25三一重工215-8C挖掘机故障代码
- 2024-09-23唇边密封圈-液压传动基础知识
- 2024-10-08液压系统的组成
- 2024-09-13开始作业点检-挖掘机驾驶操作篇
- 2024-09-18单向阀的切换要领-挖掘机换装及注意事项