
L290/L291/L292三芯片直流电动机速度和位置伺服控制
L290/L291/L292三芯片直流电动机速度和位置伺服控制
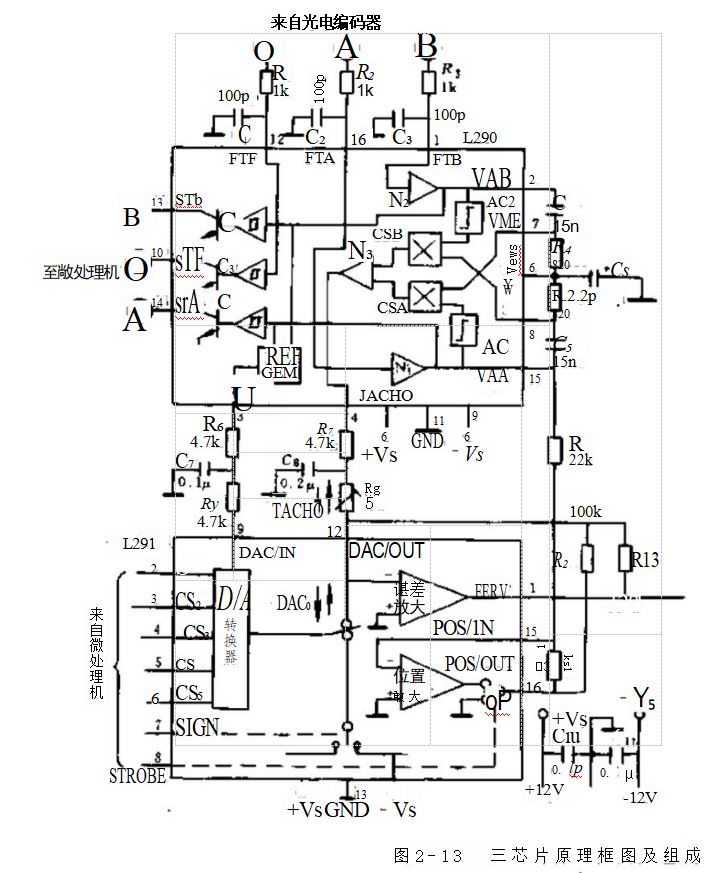
L290/L291/L292 三种专用集成电路是SGS 公司为直流电动 机控制而设计的。它们与一台带光电编码器的微型直流伺服电动 机可组成一个由微处理器或微机(MCU) 控制的位置同服系统,见 图2-13。它们也可以单独使用,例如由L291、L292 构成一个直流 电动机速度控制系统。
1.L290 转速/电压转换器 L290 是16脚的塑料封装单片大 规模集成电路 (LSI), 它完成下列三个功能;
·F/V 变换器产生测速电压 ·基准电压发生器
·位置脉冲发生器
使用电源电压为±10~15V, 从光电编码器来的输入信号 FTA、FTB、FTF 的峰值为士7V。
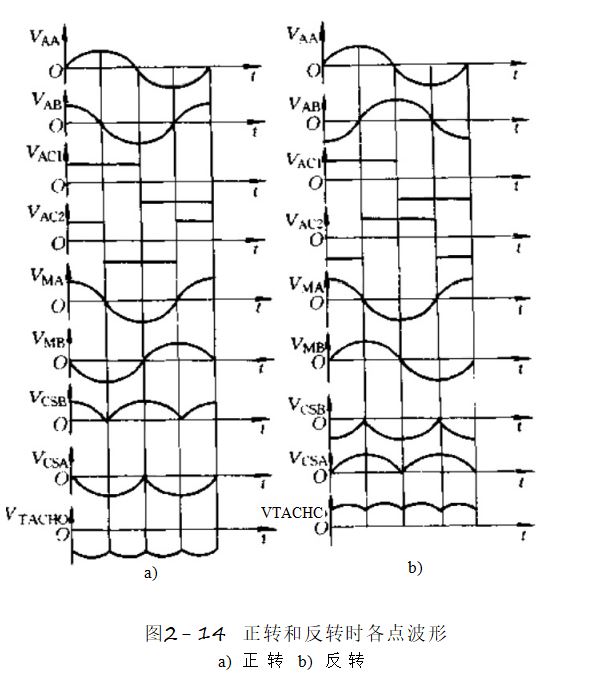
对测速电压(TACHO) 的产生说明如下。光电编码器的输出 信号中,FTA 和 FTB 是两路正交的正弦信号,而FTF 是每转1 个脉冲的信号。FTA 和 FTB 由放大器N₁ 和 N₂ 放大后产生VAA 和VAB,经外接RC 网络微分,信号VMA和VMB与原信号间有相移, 且幅值与电动机转速成正比。它们分别送至两个乘法器的输入端。 两个乘法器的另一输入端分别为VAC₁ 和VAca,它们是由VAB和VAA 经比较器后得到的。两个乘法器输出在运算放大器N₃ 中求和前 获得测速信号 TACHO, 完成了F/V 变换器的功能。图2-14表示 了在正转和反转时各点波形。
L290 还 将STA 、STB 、STF 三个方波脉冲信号送给MCU。 STA 和STB 供位置跟踪用,STF 供系统初始化用,以确定绝对位 置的原点。
L290 还为L291 产生一个基准电压,此基准电压为 VREF=|VAAl+|VABl
由于测速电压也是由VAA和VRB产生的,因此系统有自补偿的位置伺服系统能使输入电平波动、温度变化和元器件老化对系统性能的影响 减小。
。
。
D/A转换器和误差放大器 L291 是16脚塑料封装 LSI 电路,主要组成部分是5bit 的D/A 转换器,还有误差放大器 和位置放大器。使用电源电压为±10~15V。
5bit 的 D/A 转换器接收从 MCU 来的二进制数码,参考电压 取自L290, 产生双极性输出电流,其极性由输入的SIGN 决定。最
大输出电流为
式中 IREF——-基准电流。
该D/A 转换器最大线性误差为±1/2 LSB, 即最大输出的 士1.6%。输入数码与输出电流I。的转换关系见表2-2。从MCU
来的速度指令信号经D/A 转换器转换为模拟量,再与从L290 来 的测速信号在误差放大器(速度调节器)比较,产生电动机的驱 动信号 ERRV, 送 至L292 。速度调节器的参数可由外接电阻整定, 为了得到良好的稳定性,速度调节器闭环增益应等于或大于 20dB 。用 7 脚 从MCU 接 收SIGN 信号来控制电动机的转向。

设置的位置放大器使位置增益可单独调整,并且由8脚的 STROBE 信号决定系统的工作方式。当此信号为低电平时,位置 放大器输出接至16脚,系统工作于位置闭环工作方式;若此信号 为高电平,则为位置开环方式,即仅速度闭环控制,此时16脚接 地 。
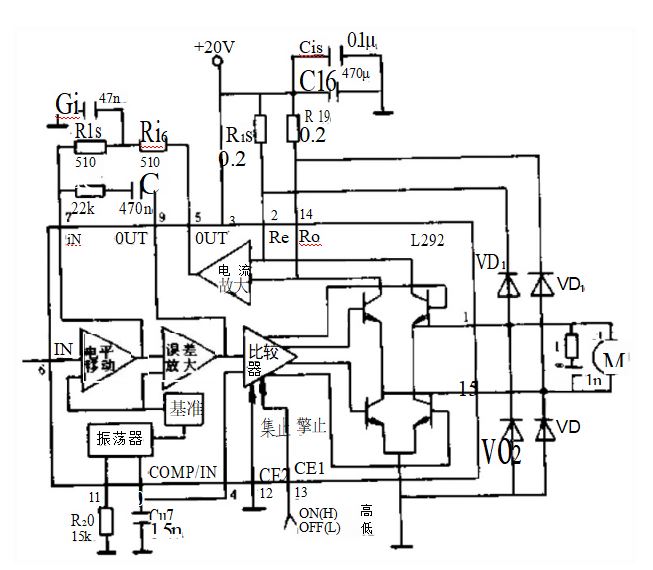
3.L292 开关式直流电动机驱动器 L292 是15脚塑封的智 能功率集成电路,其内部有一个功率跨导放大器,组成PWM 电 流环,向直流电动机提供双向的电枢电流与输入(6脚)的ERky信 号成正比。其特点是
· 使用单电源(18~36V)
· 驱动能力为2A、36V、1~30kHz PWM
·两个逻辑使能端
·外接环路增益调节
·有过载保护和电源欠电压保护
L292设置有电流检测(由R₁g、R₁9用作电流检测电阻)和电 流调节器。反馈滤波器和电流调节器的参数可从外部调整,实现 电流闭环调节。内部设有电平移动电路,使电路在单电源下工作, 可实现电动机正反转运行。输出级为H 型桥式,为了避免两桥臂 出现同时导通的危险,实际上末级有两个比较器,构成窗口比较 器,接受控制电压和振荡器三角波信号,两个比较器输出的PWM 信号有一定的时延。该时延r 的大小由10脚外接电容器C₁7和内
部内阻的RC 乘积决定。如图2-13,C≈15nF,Rr≈1.5kQ, 则
t≈2.25μs 。 当使用多个L292 驱动多台直流电动机同步运行时,此 RC网络应有正确接法;以避免产生开关噪声及互调问题。
L292 还具有输出级封锁功能,利用12和13脚不同组合来封 锁输出。仅12脚为低电平、13脚为高电平时,系统才能正常工作, 其余组合状态均为封锁。
4.L290 、L291和 L292 组成的直流位置伺服系统 如图2-13 所示,在此位置伺服系统中,与直流伺服电动机共轴一台光电编码器输出在L290 产生测速反馈信号(4脚)和位置反馈信号(15 脚),送给L291, 并产生位移-方向信号,送给MCU 。MCU 运算 决定每个运动的最佳速度曲线,以合适的指令控制L291。在该系 统中,MCU 与 L290 、L291的连接线是10条I/0 线:7条输出和 3条输入。给L291 的是5bit 速度指令数码、SIGN (设置转向)和 速度/位置工作方式选择信号STROBE, 从 L290 来的三条输入线 是STA 、STB 、STF。
为了跟踪电动机位置,MCU 以 STA 计数,测量实际的位移 量,并以STA 和STB 之间的相位关系来判别方向。常用方法是以 STA 作为中断输入,1个中断服务程序将STB 采样,由相位差决 定计数是加还是减。
对于每一个运动,MCU 计算出位移,确定正确方向。系统起动时,首先工作于位置开环(速度闭环)控制方式。MCU 向 L291 发出最高速度的指令码(若位移指令的距离很短,设定的速度可 能要低一些),电动机以最高允许峰值电流起动,使电动机加速至 设定转速。借助STA 中断服务程序,逐步接近目标。然后逐步减 小速度指令码,电动机制动。最后L291 进入位置闭环控制方式、 实现精确定位。图2-15给出此过程的转速和电流变化。
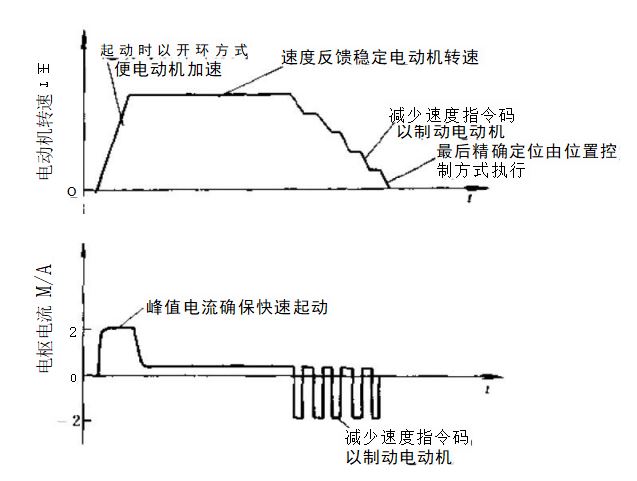
图2-15 两种工作方式下的转速与电流变化
图2-13所示系统使用的电动机参数是:额定电压为18V, 最 高工作电流为2A, 电枢电阻为5 .40,电感为5 .5mH, 空载转速 为3800r/min, 反 电动势系数为4.5mV/(r /min)。光电编码器条 纹数为200。 PWM 频率为
表2-3给出这个实例的外接元件推荐值,并解释它们在系统 中的作用以及数值增大或减小时对系统性能的影响。
外接元件选择和对系统的影响
元 件 | 推荐值 | 作 用 | 大于推荐值 时的影响 | 小于推荐值 时的影响 |
R₁,R₂,R | 1k | 滤除编码器噪声 | 使UAA、UAb偏移 电压增加 | |
R₄,R₅ | 8200 | 微分网络 | 转速偏移和转速 信号增加 | 转速偏移增加, 转速信号减小 |
R₆,R₇ | 4.7k0 | D/A.转换器输入 电流的设定 | 输入电流增加 | 减小 |
Rg | 4.7k0 | 设定电动机转速 | 增加 | 减小 |
R₉ | 5k0 | 调节转速 | 当R₉<<R₁₃/10时,有可能振荡 | |
R₁ R12 | 22k0 100k0 | 设定位置环增益 | 降低 | 增加 |
R|3 | 120k? | 设定速度环增益 | 增加 | 降低 |
R₁ | 15k | 设定位置环增益 | 增加 | 降低 |
R₁s,R₁₅ |
5100 |
反读电流滤波 | 当Rs十R₁₆ ≤3.3kQ时,电流检测放 大器输出有饱和的可能 | |
R₁ |
22ko | 设定误差放大器 增益 | 高频增益增加, R₁7>5,6kQ时 有振荡的可能 | |
Rig,R₁9 | 0.20 | L292跨导率设定 | 减小 | 增加 |
R₂0 | 15k0 | 设 定 P W M 频 率 | 降低 | 增加 |
R21 | 330 | 补偿网络 | ||
C1,Cz,C₃ | 100pF | 滤去综码器噪声 | 频带变窄 | 变宽 |
C₄,C | 15pF | 微分网络 | TA CHO信号增 加 | 减小 |
Cs | 2.2μF | 旁路电容 | 增大值压建立时 间 | 降低对低频的旁 路作用 |
C |
0.1pF | 对 D / A 转 换 器 输入电流低通渡 波 | 低速时电流纹波 增加 | |
Cs |
0.22μF | 对TA CHO信号 的低通滤波 |
速度环频带变窄 | 低速滤波效应降 低,使系统嗛声 增大 |
元件 | 推荐值 | 作 用 | 大于推荐值 时的影响 | 小于推荐值 时的影响 |
C10,C | 0.1μF | 电源旁路 | 有振荡可能 | |
C₁2 | 47oF | 反馈电流滤波 | 阻尼系数降低 有可能振荡 | 阻尼系数增大 |
C₁3 |
47nF | 取 C R = L / R..。取消电流环 极点 | ||
C₁5 | 0.]pF | 电源旁路 | 有振荡可能 | |
C₁6 | 470μF | 电源旁路 | 纹波电压增加 | |
C |
1.5oF | 设定振荡频率和 输出晶体管死区 | 频率降低 死区增大 | 频率增加 死区减小 |
C1s | 1nF | 补偿网络 | 有可能振荡 |
L292在直流电动机速度控制中的应用L292是单片功率
集成电路,其功能如同一个跨导放大器,H 桥输出负载电流与输 入端(6脚)的信号电压成正比。下面是在直流电动机速度控制中 应用的例子。
(1)直流电压控制的速度控制系统:该系统见图2-16,这里 用一台直流测速发电机(TG) 作速度反馈。它的电压常数是Kg。 输入的控制电压Vi 从电位器RP, 得到。由它的极性控制电动机转 向。在士10V 供电的误差放大器中,有下列关系:
它的输出V。作 为L292 输入,设Gm为 L292 的跨导率,典型值Gm=220mA/V, 即
由输入电压Vi 与电动机负载电流I 的关系可得到
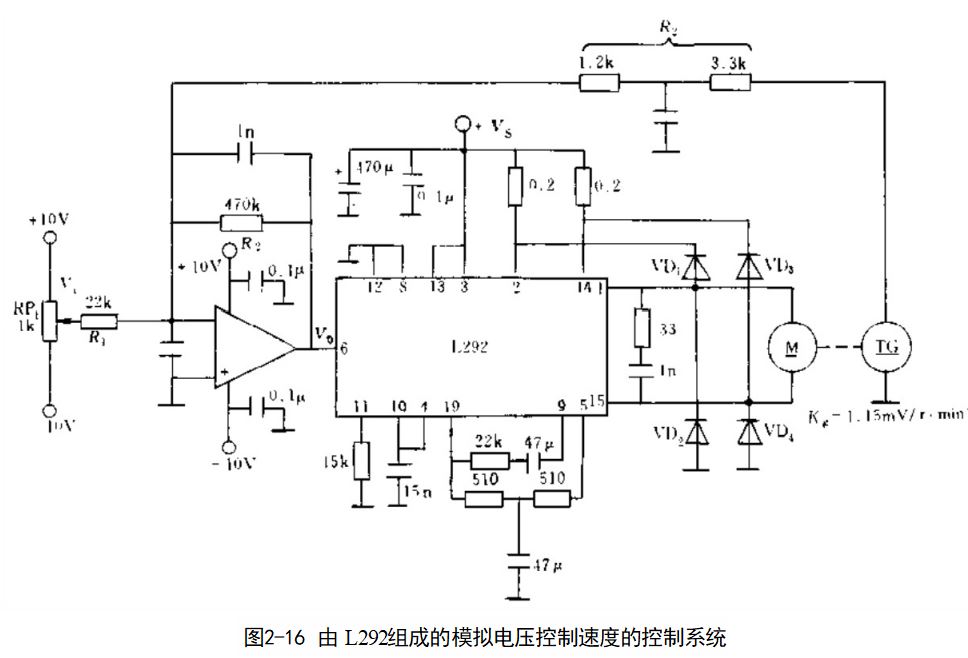
系统的转速n 与负载电流I 关系为
如果控制指令电压V;恒定,负载电流变化量△I引起转速的变化为△n, 于是有
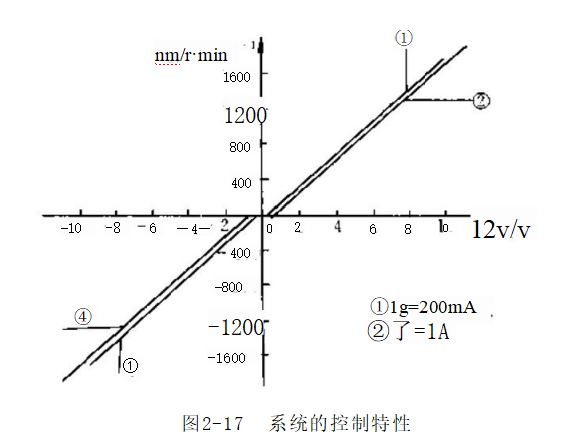
从该电路控制特性图(见图2-17)可以看出,有控制死区的 存在。曲线1表示轻载200mA, 曲 线 2 表 示 1A 时的输入电压V 与转速nM的关系图,死区的大小随电流增加而增大。从上式可见, 在这个有差调节系统中,增大增益(如增大R₃), 有利于减小死区, 减小负载对转速的影响。
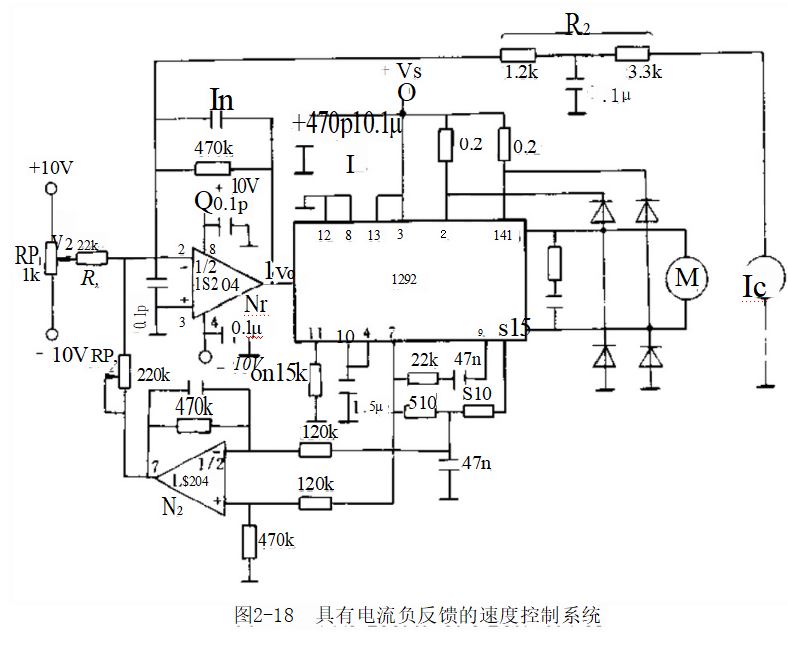
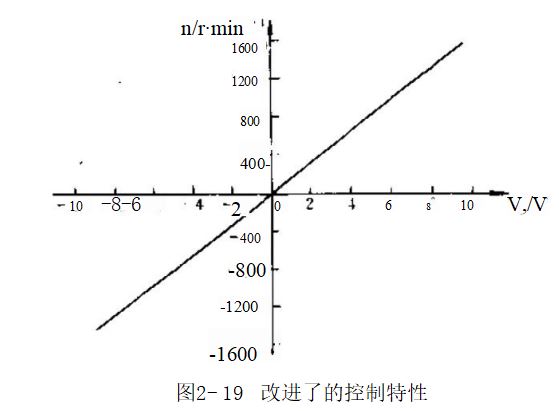
另一个改进的方案是将电流反馈信号以误差放大器求和点引 入,增加一个电流反馈环。此方案见图2-18。L292 电路中,与电 动机平均电流成正比的电流在5脚和7脚之间的外电路流过,如 图2-18所示,从5100电阻上采样经一运算放大器放大调节后,送至误差放大器的2脚。反馈系数由电位器 RP₂ 整定。适当调节 RP₂, 可抑制负载电流对转速的影响。从图2-19可见,该电路的 控制特性在2A 电流内都是一条通过原点的直线。
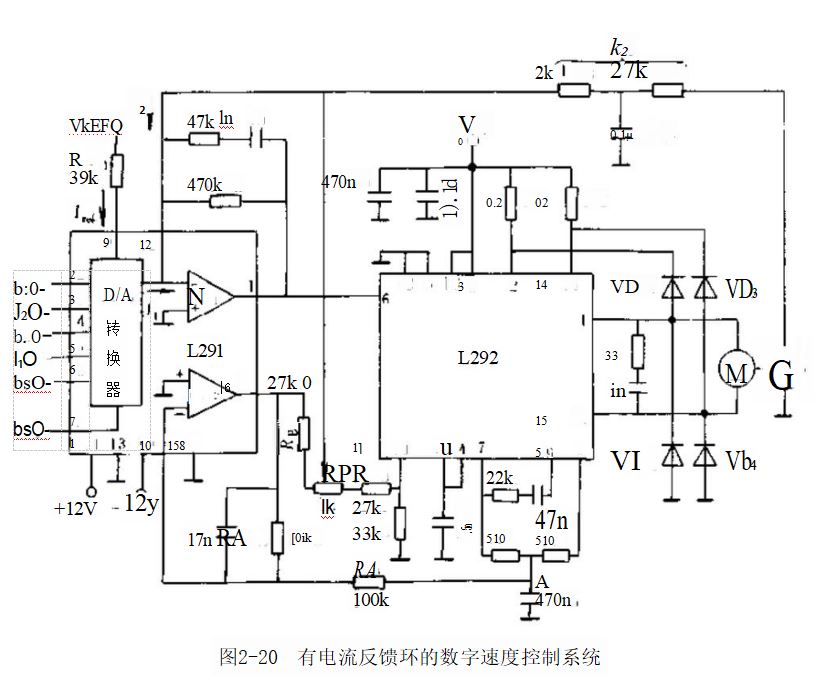
(2)由L291 、L292 组成的数字控制的速度系统:该系统电路 图见图2-20。在这个例子里,数字速度指令是二进制数码,从L291 输入。测速发电机输出电压从12脚输入,N₁ 为误差放大器。由7 脚逻辑电平决定电动机转向。利用L291 内部放大器N₂ 引入电流 反馈。与上例稍有不同,由于N₂ 只有反相输入端可以使用,故电 路稍为复杂一点。电流反馈信号从电位器RP, 滑动触头取得。调 整方法是这样的,让给定零速数码 (b₁~bs 均为1)输入,调节电 位器RP, 使电动机转速为零。
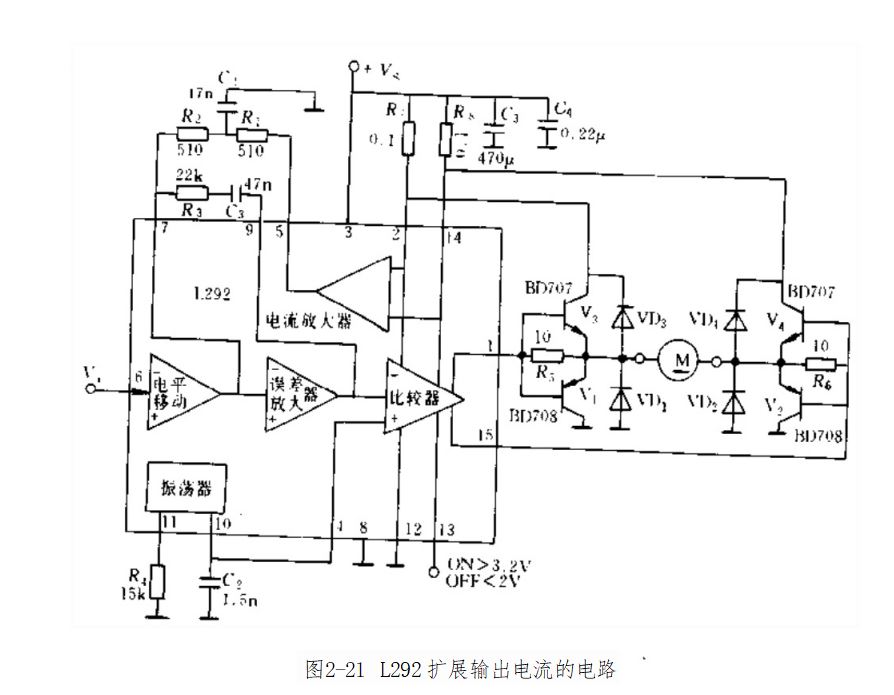
6.L292 驱动功率的扩大 L292 PWM驱动器最大驱动能力 为36V 、2A, 可用于约60W以下低压直流电动机的控制。在机器 人、机床进给系统等大功率系统中应用时,可外接较大功率的晶 体管,以扩展其驱动功率。
对于电压为36V 以下,仅扩大驱动电流到4A 的电路,见图 2-21。表2-4给出要求输出电流为4、6、8A 时,应选择的功率晶 体管和续流二极管、取样电阻 (R₇ 、Rg) 的 推 荐 数 据 。
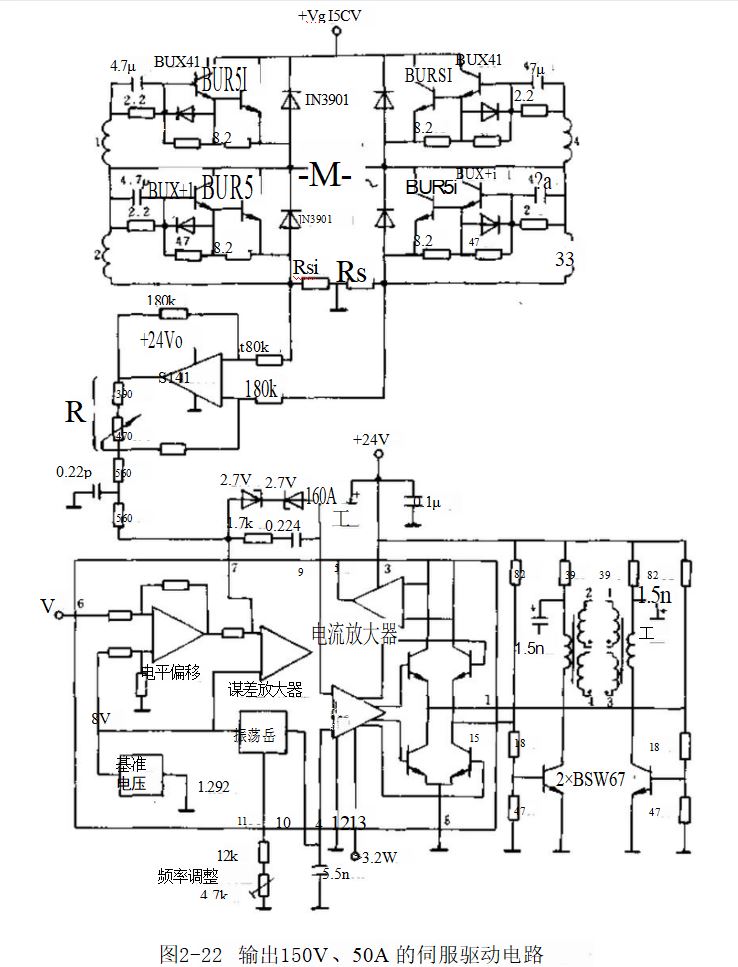
另一个功率扩展的示例是图2-22所示的150V、50A 驱动能 力的电路。L292输出经两个变压器去控制外接H 桥电路,变压器的电压比为1:20。跨接在7脚与9脚之间的两个稳压二极管用 来限制变压器的占空比(15%~85%)。LS141 运算放大器向L292 提供电流反馈。两个电流取样电阻是R、R₃₂ 。 电动机负载电流I 与6脚输入电压V 的关系是
这里,R,=R=R₂₂=12×10-³Ω 。 当 R 的值是390~8600变化时, 该电路的跨导率I/V, 是3.0~8.6A/V。
推荐的电路数据
输出电流 /A | 指令电压 Vi/V | 取祥电阻 /mQ | 功率晶体管 | 续流二极管电流 (快速二极管) | |
V,、V₂ | V、V | ||||
4 | 9.1 | 100 | BD708 | BD707 | 2A |
6 | 9.1 | 65 | BD908 | BD907 | 3A |
8 | 9.1 | 50 | BDW52A | BDW51A | 4A |
随便看看
- 2024-11-06增压空气的冷却
- 2024-10-11外啮合中高压齿轮泵
- 2024-12-04叶片式油马达的修理
- 2024-09-20神钢6E挖掘机故障代码中文翻译
- 2024-11-18增压器求语及符号注释