
电子调速系统
虽然各种电子调速器系统会存在许多细小差异,然而, 大体上都必须有以下几部分;
(a) 转速传感器;
(b) 负荷传感装置(需要时)
(c) 混合、加工及放大信号的电子组件;
(d)操纵喷油泵齿条的执行机构; (e) 电源。
此外,还必须包括一些滤除速度信号周期性变化的滤波 器(如弹性传动装置)和一个位置反馈传感器(速度降联动 装置)。一些电子调速系统没有位置传感器,因此要获得十 分精确的性能就很困难。遗憾的是,位置传感器是一种很昂 贵而又易出故障的装置。
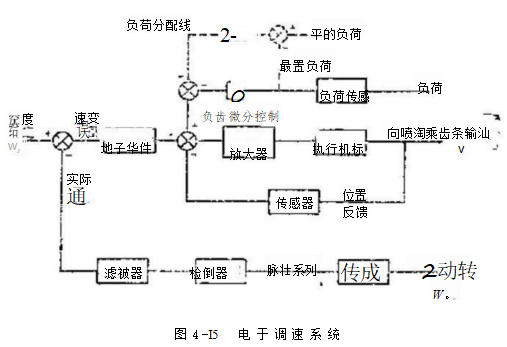
图4-15表示了电子调速系统。
转速传感器通常就是一种检测齿数的感应头,而带齿的 轮环固定在发动机轴上,传感器发出一系列脉冲信号(频率 范围为1000~5000Hz, 然后,信号在检测电路中累加, 产生 一个与转速成比例的电压。
滤波之后,转速反馈信号与转速给定信号进行比较,产 生转速误差信号,该误差信号在电子线路中整形。整形就是 典型比例加积分或滞后一超前校正,从而获得跟机械调速器 一样的频率响应曲线。
注意,在这个闭环系统的前向通道中,砦无微分控制, 虽然对增强系统稳定性有益,可是会放大高频信号分量,并 且使输出“振荡”。
在功率放大级上将整形后的误差信号放大,以便驱动执 行机构。如果应用具有小型电液力马达的液动执行机构,这 种功率放大器是相当合适的。或者采用一种全电动执行机构 (用电马达驱动)及大型螺线管。这类功率放大器也是很有 价值的。
执行机构的位置反馈传感器,可以是一种电位让,但这 种电位计用在有震动的发动机上,其使用寿命一般都很短。 较为普遍使用的是线性可调差动变压器 (L.V.D.T), 这种变压器是一种无触点装置,其使用寿命要长得多。这种线性 可调差动变压器的主要缺点是,需要相当多的辅助电子元件 来提高其准确度和解决温度漂移的问题。
负荷传感信号可由喷油泵齿条的位置取得,同样可以采 用线性可调差动变压器取得。当然,对并联运行的船用发动 机负荷分配取得的信号,不能用于瞬态校正。因为这些信号 要通过执行机构的移动才能取得,也就是总发生在“事后”。 真实负荷只有在发电机组上实际测定,就是在发电机三相输 出线上用电流和电压互感器进行测量,其精度可达几千瓦。 负荷测定电路产生的电压通过耦合电容后得到负载的微分信 号,该信号作为瞬态校正用。为了进行负荷分配,来自全部 发电机组的相同信号相加,得出平均负荷信号,然后把各台 发电机负荷与这个平均值相比较,就得出一个负荷误差信 号,再让这个负荷误差信号经比例加积分 (P+1) 整形,
稳定后输入电子组件,使各台发电机之间的负荷达到平衡。
随便看看
- 2024-09-20时间控制器结构
- 2024-09-23凯斯挖掘机TR3发动机108故障代码
- 2024-09-19分流阀-液压传动基础知识
- 2024-09-14冷却水的更换-挖掘机点检整备篇
- 2024-09-14内压,杂质,放油,滤芯,加油-挖掘机点检整备篇