
运动控制和电动机控制专用微处理器
运动控制器通常是以微处理器为核心,由计算机编程、运动轨迹设计,向伺服电动机或步进电动机发出运动指令,实现被控对象的位置、速度、加速度控制。运动控制器可分为“箱式”、“卡式”和“单片”三个层次。这里介绍的是单片大规模集成电路的运动控制器。实际上,它是一种专用微控制器。
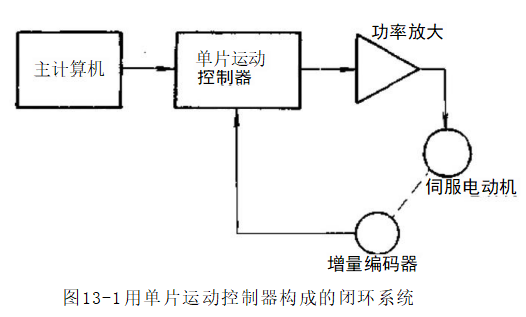
表13-1给出了LM628/LM629、HCTL-1100和GL-1200三种单片运动控制器集成电路的主要数据比较。如图13-1所示,它们从主计算机接收控制指令,从伺服电动机的增量编码器接收位置信息,向伺服电动机功率驱动电路输出运动指令。对于伺服电动机位置闭环系统来说,它们主要是完成了位置环电路作用,可称为数字伺服运动控制器。它们适用于直流伺服电动机、无刷直流伺服电动机和步进电动机的闭环伺服控制。而GL-1200步进伺服控制器则将一个直流伺服电动机闭环控制转换成类似对一台步进电动机开环控制一样,使主控制器的控制算法得以简化。
表13-1三种运动控制器主要数据比较
型号 | GL-1200 | HCTL-1100 | LM628/LM629 |
商品名称 | 步进伺服控制器 | 通用运动控制器 | 运动控制处理器 |
生产厂商 | GalilMotionControl | Hewlettpackard | NationalSemicoudu-ctor |
控制器速度/MHz | 0 | 2 | 6 |
环路采样时间 | 0MHz | 64μs~2.048ms | 34]μs |
与主计算机接口 | 脉冲 | 8bit并行 | 8bit并行 |
专用I/O口 | Error,inhibit | 2个输入.2个输出 | 8输出 |
型号 | GL-1200 | HCFL-1100 | LM628/LM629 |
给电动机控制输出 | 位置误差,阻尼信号 | 8bit并行,换向信号 | 8bit单行口(LM628) |
PWM输出 | 有 | 有 | 有(1.M629) |
速度图发生器 | 无 | 有 | 有 |
主计算机中断 | 无 | 有 | 有 |
错误处理 | 有 | Stop和LIMIT标志 | 有 |
指令结构 | 脉冲 | 6bit地址,8bit数据 | 8bit总线(2~14B) |
增量编码器和译码器 | 是 | 是 | 是 |
施转变压器或绝对编码器 | 否 | 否 | 否 |
译码器动态范围/bit | 12 | 24 | 32 |
位置与速度控制模式 | 是 | 是 | 是 |
最大距离(计数) | 600000 | 士8388609 | ±1073741824 |
最高速度/计数·s-I | 31~1.25×105 | 士750000 | |
轨迹参数 | 一 | 4种模式 | 15/16bit |
算法 | PD | 领先 | PID |
滤波器系数/bit | 一 | 8 | 6 |
辅出分辨率/bit | 8 | 8 | 8或12,可选 |
电源电压/V | 5 | 5 | 5 |
封装 | 28脚DIP | 40脚DIP | 28脚DIP |
CY500和PPMC系列集成电路是专门为步进电动机设计的智能控制器。它们从主计算机接收步进数、以及起动频率、最高频率、加减速斜率等运动参数,经运算再向步进电动机驱动电路发出适当的脉冲分配指令或步进脉冲指令,完成所需的步进运动。
AD2S100是为异步或同步电动机矢量转换而设计的,可用于这些交流电动机的矢量控制。
随便看看
- 2024-11-25CY14-1A(B)型轴向柱塞泵部分零件的制造工艺
- 2024-11-20YCY14-1B型泵的流量 特性曲线与调节
- 2024-09-14点检下部行走体的机油泄漏、磨耗-挖掘机点检整备篇
- 2024-11-12东芝阀介绍
- 2025-01-09双极型半导体三极管的特性曲线和参数