
LMD18200/LMD18201/LMD18245H桥驱动器
NSC公司生产的LMD18200系列单H桥驱动器系列工作电.压达55V,连续工作电流为3A,峰值电流为6A。它有低的导通电阻,LMD18200的RpsON=0.3Ω。在同一芯片上制作了BiCMOS控制电路和DMOS功率器件。它们可用来驱动直流电动机、步进电动机或其他感性负载,适用于位置、速度伺服控制,计算机用打印机、绘图机、机器人的控制。
图11-16给出LMD18200功能框图。

末级H桥高侧DMOS功率器件要求其栅极驱动电压大于电源正级电位约8V以上才能导通。为此该集成电路设置了内部充电泵电路,它由一个300kHz振荡器控制,充电泵电容被充电至14V左右。此栅极驱动电压上升时间典型值为20μs,适用干工作频率1kHz左右情况。如果要求更高开关工作频率,需要外接自举电容。推荐用两个10nF电容器分别接于1、2脚和10、11脚之间,使栅压上升时间在100ns以下,允许开关工作频率达500kHz。外接电容形成第二个充电泵电路,大的电容值提供足够的能量向功率器件栅极寄生输入电容快速充电,以得到快得多的上升时间。
为了防止感性负载开关工作时瞬态过电压对功率器件的损害·四功率开关都设置有钳位保护二极管,它们的反向恢复时间对上桥臂开关二极管约为70ns,对下桥臂开关二极管约为100ns。
该集成电路有过电压、过电流和过热保护功能。LMD18200内设置有电流检测电路,功率输出电流1A对应8脚输出电流377μA。它有良好的线性关系和精确度。由8脚对地串联一个合适的电阻,正常输出电流时使8脚电压约为5V左右。应注意的是,电流检测信号不能反映续流时的输出电流。保护电路设置的过电流阈值约为10A左右,当电动机出现短路、堵转等过载情况时,会自动关断输出的功率开关。但内电路会周期性地使功率开关恢复正常工作方式。如果过电流仍照旧发生,最后由过热保护动作来关闭整个集成电路。
该芯片设置有过温检测电路,当结温到达145℃时,由9脚发生过热报警信号,它是集电极开路晶体管输出,可用来向主计算机提出中断请求。系统可适当减低负载电流或命令系统停机。结温达到170℃时关断输出功率开关。
该电路工作于高频开关状态,建议在电源Vs引脚6与地之间并联1μF左右的高频瓷介电容器。若驱动大电流感性负载,还要并联大电解电容,每1A负载电流至少要100μF,用作感性负载续流的吸收电容。
输人控制信号包括方向(DIRECTION,3脚)、制动(BRAKE,4脚)和PWM(5脚)。PWM控制可采用两种方式。
方式1:PWM信号从3脚输入,而5脚接高电平。50%占空比PWM信号对应于零驱动,平均负载电流为零。而大于50%占空比的PWM信号对应于正向电流,负载电流从2脚向10脚方向流过。小于50%占空比的PWM信号对应于负向电流,从10脚向2脚方向流过。
方式2:3脚输入符号信号,逻辑1表示正向,逻辑0表示反向。5脚输入PWM信号,其占空比与负载电流大小成正比关系。LMD18201有相似的功能。不同之处是没有内部电流检测,可由7脚对地串接电流检测电阻代替,8脚改为逻辑地。
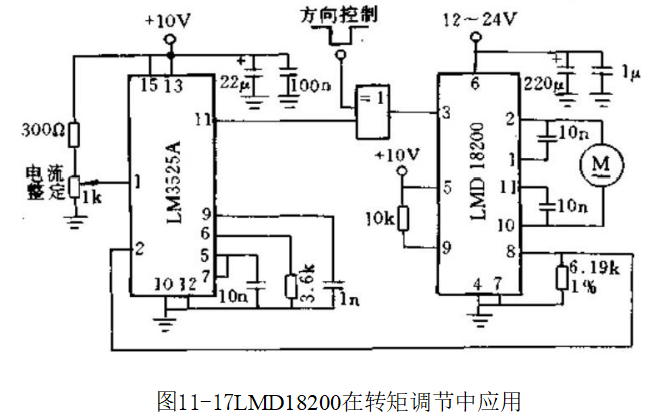
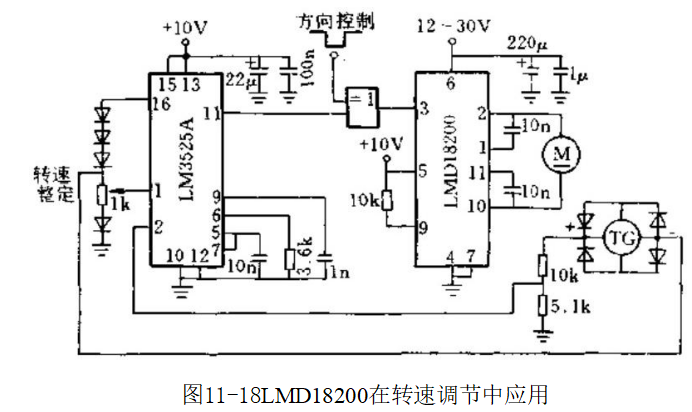
图11-17和图11-18给出该集成电路应用于直流电动机转矩调节和速度调节的原理图。PWM控制采用方式1。图中LM3525A是一个通用型PWM控制器。在转矩调节图中,8脚引出电流检测信号提供转矩反馈,在转速调节图中,以一直流测速发电机提供转速反馈,它的转速灵敏度为1V/(r/min)。
若系统需要制动功能,可使用制动脚4,使电动机两端被短接制动。4脚高电平为制动,但同时要求5脚也为高电平。若3脚(方向)为高电平,两个上桥臂开关导通;若3脚为低电平,两个下桥臂开关导通,使电动机短接制动。如果4脚高电平,但5脚(PWM脚)为低电平,全部四个桥臂开关关断,不能实现制动,电动机滑行到停止。
衰11-9三输人逻辑真值表
|
PWM(5脚) |
方向(3脚) |
制动(4脚) |
H桥输出状态 |
|
H |
H |
L |
正向电流 |
|
H |
L |
L |
负向电流 |
|
L |
× |
L |
两上桥臂导通 |
|
H |
H |
H |
两上桥臂导通 |
|
H |
L |
H |
两下桥臂导通 |
|
L |
× |
H |
四桥臂同时关断 |
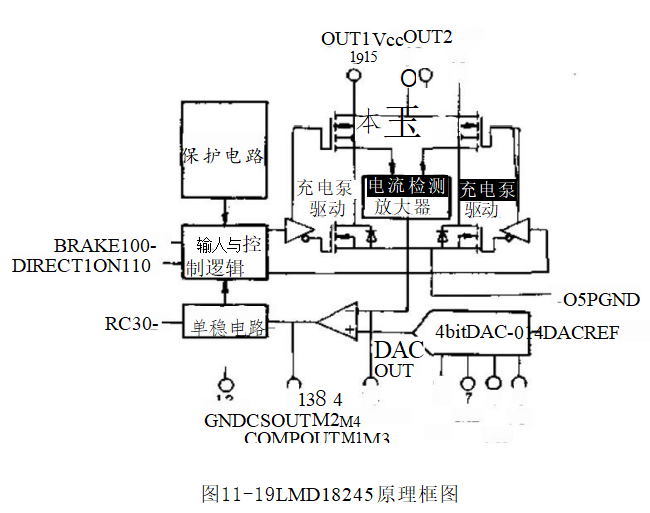
图11-19是LM18245H桥电动机驱动器原理框图。
LMD18245与LMD18200相比,有下列的改变:内部包括了固定关断时间的电流斩波器电路,电流指令是4位二进制数M4(MSB)到M1(LSB),内部设有4位D/A转换器;不必外接PWM信号;内部设置的电流检测放大器输出一个电流信号,它与H桥输出电流有正比关系,典型值为250μA/A;由13脚(CSOUT)串接一个电阻到地,可得电流检测电压信号,作为内部电流比较器输入,它与DACOUT比较,经单稳电路得到PWM信号,对H桥输出电流进行斩波控制;利用14脚输入DACREF电压作为D/A转换基准电压,DACOUT输出D/16模拟量电流指令信号,D为对应于输人二进制指令的十进制数D=0~15。如果利用两个LMD18245驱动两相步进电动机,容易由主计算机控制,实现半步、1/4步或微步距控制。需要更高分辨率的微步距控制时,可外
接D/A转换器从14脚输入。3脚外接RC网络决定单稳的时间td。
ta即为固定关断时间。
使用两片LMD18245可驱动两相步进电动机。图11-20是驱动一台200步/r典型混合式两相步进电动机的例子,额定电压和电流分别为12V、0.95A,每相电感为12mH,电阻为122。设置单稳延时时间50μs。4位D/A转换得到1/16的电流分辨率,可实现4细分正余弦微步距驱动,将一个步距(90°电角度)细分为22.5°微步距。在表11-10中给出一个周期内共16步,1相(余弦相)和2相(正弦相)应当输入电流指令数据(D为对应的十进制数)和方向(DIRECTION)信号。正常工作时BRAKE=0。相绕组电流I=0.0625D(A)。从上到下顺序为正转,反方向顺序为反转。
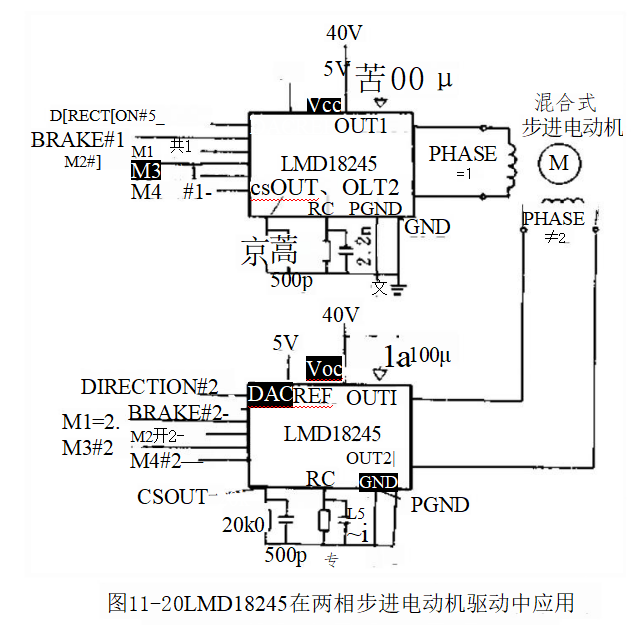
表11-10两相步进电动机4细分电流指令
|
转角a/(°) |
1相 |
2相 |
||||
|
|cosa |
D |
方向 |
|sina| |
D |
方向 |
|
|
0 |
1 |
15 |
1 |
0 |
0 |
1 |
|
22.5 |
0.924 |
14 |
1 |
0.383 |
6 |
1 |
|
45 |
0.707 |
11 |
1 |
0.707 |
11 |
1 |
|
67.5 |
0.383 |
6 |
1 |
0.924 |
14 |
1 |
|
90 |
Q |
0 |
0 |
1 |
15 |
1 |
|
112.5 |
0.383 |
6 |
0 |
0.924 |
14 |
1 |
|
135 |
0.707 |
11 |
0 |
0.707 |
11 |
1 |
|
157.5 |
0.924 |
14 |
0 |
0.383 |
6 |
1 |
|
180 |
1 |
15 |
0 |
0 |
0 |
0 |
|
转角r/(°) |
1相 |
2相 |
||||
|
icosa} |
D |
方向 |
|sinα] |
D |
方向 |
|
|
202.5 |
0.924 |
14 |
0 |
0.383 |
6 |
0 |
|
225 |
0.707 |
11 |
0 |
0.707 |
11 |
0 |
|
247.5 |
0.383 |
6 |
0 |
0.924 |
14 |
0 |
|
270 |
0 |
0 |
1 |
1 |
15 |
0 |
|
292.5 |
0.383 |
6 |
1 |
0.924 |
14 |
0 |
|
315 |
0.707 |
11 |
1 |
0.707 |
11 |
0 |
|
337.5 |
0.924 |
14 |
1 |
0.383 |
6 |
0 |
随便看看
- 2024-10-30典型调速器性能参数
- 2024-09-27WY-160 挖掘机回转制结构的改进
- 2024-09-14装载作业-挖掘机驾驶操作篇
- 2024-09-18使用平板台或者堆土时-挖掘机运输篇
- 2024-10-22工程机械液力传动系统工作油的选用