
TL494在有刷和无刷直流电动机控制中的应用
TL494是美国德州仪器(TexasInstrument)公司产品,原是为开关电源设计的脉冲宽度调节器。电路功能框图见图10-1。16脚集成电路内由一个振荡器、两个比较器(死区时间比较器和PWM比较器)、两个误差放大器、一个触发器、双与门和双或非门、一个+5V基准电压源、两个NPN输出晶体管等组成。6脚和5脚外接电阻RT和CT确定了振荡器产生锯齿波的频率fosc。
式中,Rr和Cr取值范围:R=5~100kΩ,CT=0.001~0.1μF。

输出调制脉冲宽度是由电容Cr端的正向锯齿波和3、4脚输入的两个控制信号综合比较后确定的。当外接控制信号大于5脚电压时,9和10脚输出脉冲为低电平(设9、10脚为跟随器接法)。因此随着控制信号幅值的增加,TL494输出脉冲占空比减小。13脚用来控制输出模式。该端为高电平时,两路输出分别由触发器Q和夏端控制,形成双输出方式,即推挽型输出。此时PWM输出脉冲频率为振荡器频率的一半,最大占空比为48%。若13脚为低电平时,触发器控制不起作用,两路输出相同,其频率与振荡器频率相同,最大占空比为98%。此时两路可以并联输出,以增大驱动电流能力(约400mA)。
4脚为死区时间控制端,该端外接电平大小决定两路推挽输出方式下,在最大占空比时两脉冲之间的死区。4脚为地电平时,死区时间为最小,可获得最大占空比。这一功能可用于逆变器控制,如两路输出用来控制上下两桥臂开关,可防止两开关在换相时出现直通。
两个误差放大器的同相和非同相输入端可分别接至基准信号和反馈信号,在电动机控制系统中常用作电压、速度、电流调节器,完成闭环控制,或者作过电流、过电压、欠电压、过温等比较器,实现保护功能。
基准电压端14脚,输出电压为5V±5%,温漂典型值为0.01%/℃。可为上述调节器、保护比较器提供参考基准。
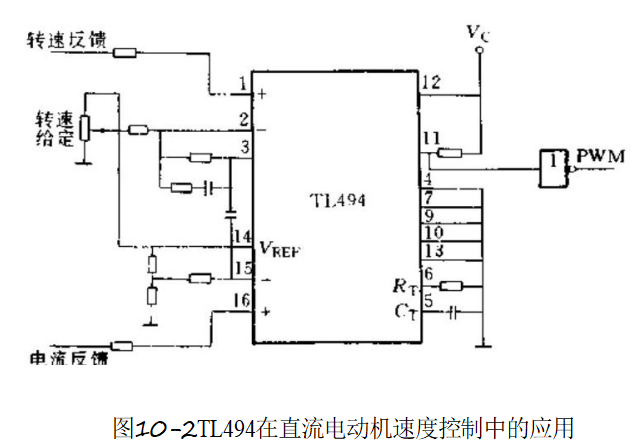
在有刷或无刷直流电动机速度控制系统中应用时(见图10-2),利用其中一个误差放大器从2脚输入转速给定电压信号,1脚输入转速反馈电压信号,此放大器作速度调节器使用,2-3脚之间引入阻容校正。另一个误差放大器作限流保护比较器,从16脚引入电动机电流检测信号,从15脚输入规定限流值信号,此信号可从14脚内部基准电压源经电阻分压得到,使电动机起动、或过载、或故障时的过电流限制在安全范围之内,以保护电动机和功率开关管。在芯片内,由速度调节器输出控制得到PWM信号,此信号用来控制外接的功率级电路,以维持电动机的转速为恒值。
在直流电动机(含无刷直流电动机)的双闭环调速控制系统中,速度调节器的输出为转矩(或电流)给定信号I'。可利用TL494作为电流调节器和电流限制器(见图10-3)。电流反馈检测信号I从1脚输入,指令电流I"从2脚输入,此误差放大器连接成PI调节器方式工作,产生PWM信号。这里用锯齿波作为比较波,其效果比三角波要好些,因为锯齿波后沿十分陡,避免由于开关时刻电流的波动而引起PWM信号发生多次通断的现象。
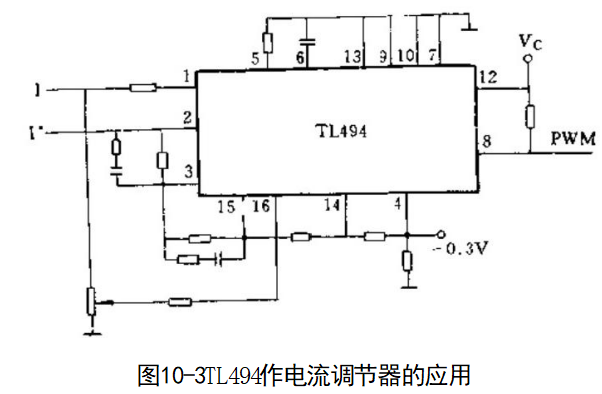
作电流调节器时,TL494的死区时间是不希望有的。如果4脚接地,PWM信号的最大占空比为96%,即功率开关不可能完全导通,这对于电流跟踪控制应用是不利的。因为当系统突加给定时,若受控电流在一个脉冲周期内不能跟踪给定值,在电流上升过程中每个周期都有4%时间要强迫关断。如果调制频率较高,则此关断时间极短(例如f=20kHz,周期T=50μs,4%T=
2μs),虽然对电流响应速度影响不大,但却造成了不必要的开关损耗。而且当开关器件在4%T的时间内还没有完全关断又被强迫开通时,其损耗更严重,甚至影响逆变器的工作安全。因此,要采取措施消除此死区。实验表明,在4脚加一0.3V电平时,即可将PWM信号最大占空比扩展到100%。
为了得到两象限控制,还需从速度调节器产生反映转矩极性的信号,和PWM信号一起控制功率开关桥的换相,供给电动机正向或反向电流。
随便看看
- 2025-01-10虚拟仪器技术
- 2025-01-10工程机械电气绪论
- 2024-11-27独立无级调节控制的新型液压冲击器
- 2024-12-31挖掘机“动臂优先”功能失效的原因和排除方法
- 2025-01-14直流电动机控制专用集成电路