
AD2S80A/AD2S81A/AD2S82ARDC单片集成电路
AD2S80ARDC跟踪式单片集成电路是ANALOGDE-VICES公司最新一代RDC,可用于自整角机、旋转变压器、感应同步器的数字转换。它是将先进的CMOS逻辑电路和高精度双极线性电路相结合,以BiMOSI工艺制作在同一芯片上。AD2S80A和AD2S82A的分辨率和动态性能可由用户选择,可供选择的分辨率有10、12、14、16bit。AD2S81A是固定分辨率(12bit)的RDC。由于它们将旋转变压器式信号转换为自然二进制数是采用一种比率式跟踪方法,输出数字角只与输入的正弦和余弦信号的比值有关,而与它们的绝对值大小无关,因此具有高的噪声抑制能力,减小由于从旋转变压器经远距离到转换器的长线带来的误差。16条数据线输出口有三态输出数据锁存功能,利用BYTESELECT等引脚控制,可以向8bit或16bit数据总线传输。还可输出与速度成正比的模拟信号(VELOCITYO/P),用来代替测速发电机。参考电压频率范围为50Hz~20kHz。
推荐运行条件: | |
电源电压(±Vs) | 士12V±10% |
逻辑电源电压(V₁) | +5V±10% |
模拟输入信号电压有效值(sin,cos) | 2V±10% |
基准电压 | 1~8V |
输入信号和基准电压失真 | 10%(max) |
输入信号与基准电压间相移 | 士10°(max) |
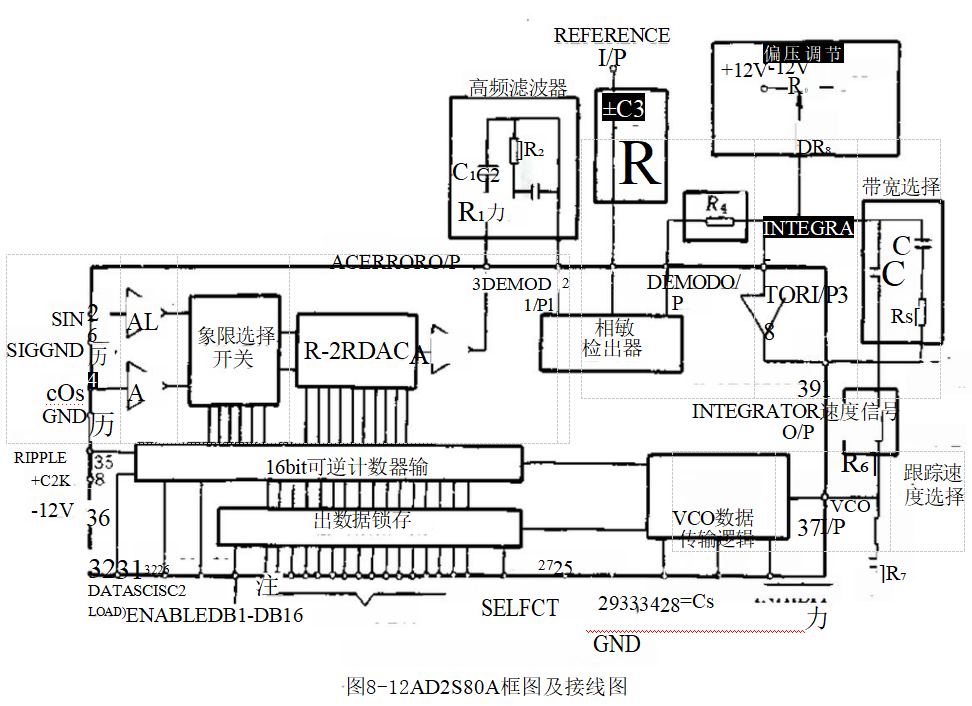
1.AD2S80ARDC图8-12表示AD2S80A内部原理框图及外部连线。按图连接后,AD2S80A就如上节所述运行于I型伺服环的跟踪式RDC。数码输出以选取的跟踪速度自动地跟踪输入信号。由于转换仅与输入SIN和COS信号的比值有关,所以输入信号的幅值和频率允许在一定范围内变化。由于相敏检波解调器的存在,对基准电压中的正交分量有高的抑制能力。
它的数字输出分辨率10、12、14、16bit可通过SC1和SC2输
入逻辑电平来选择。见表8-8。而动态性能,如带宽和跟踪速度由外接元件的选取来决定。
AD2S80A有两种封装方式:40引脚的DIP封装(见图8-13),44引脚的LCC方形封装。表8-7给出DIP封装引脚号及功能说明。
表8-7AD2S80A引脚功能说明 | ||
引脚号 | 符号 | 功能说明 |
1 | REFERENCE[/P | 基准信号输入 |
2 | DEMOD1/P | 解调器输入 |
3 | ACERRORO/P | 比车乘法器输出 |
4 | COS | 余弦信号输入 |
5 | ANALOGGROUND | 电源地 |
6 | SIGGND | 旋转变压器信号地 |
7 | SIN | 正弦信号输人 |
8 | +Vs | 正电源 |
9~24 | DB1~DB16 | 并行输出数据 |
25 | Vi. | 逻辑电源 |
26 | ENABLE | 逻辑高电平一输出高阻态 逻辑低电平一数据存于输出锁存器 |
27 | BYTESELET | 逻辑高电平-高字节送至DB1~DB8逻辑低电平-低字节送至DBI~DB8 |
28 | INHIBIT | 逻辑低一禁止数据送入输出锁存器 |
29 | DIGGND | 逻辑地 |
30、31 | SC1,SC2 | 选择转换分辨率 |
32 | DATALOAD | 逻辑低-DB1~DB16输入逻辑高一DB1~DB16输出 |
33 | BUSY | 逻辑高时、数据无效 |
34 | DIRN | 表示转向 |
35 | RIPPLECLK | 转换器输出从全1到全U或相反时出现正 脉冲,表示输入轴转一转或--个节距(感应同步器) |
36 | -Vs | 负电源 |
37 | VCOI/P | VCO输入 |
38 | INTEERATORI/P | 积分器输入 |
39 | INTEGRATORO/P | 积分器输出.即速度输出VELOCITY |
40 | DEMODO/P | 解调器输出 |
表8-8输出分辨率的选择
SC1 | SC2 | 输出分辨率/bit |
0 | 0 | 10 |
0 | 1 | 12 |
1 | 0 | 14 |
] | L | 16 |
速度信号从INTEGRATOR线性度正反转偏差零位偏移零位编移温度系数输出直流电压噪声和纹波电压O/P脚得到,主要指标如下:
±1%FSD
±1%FSD
6mV
-22μV/℃
±8V2mV
转换器跟踪速度上限取决于集成电路内压控振荡器输出频率的最高上限foscmax,对于AD2S80A,它约为1.1MHz。因此跟踪速度上限可由下式计算:

式中p=2"(n是输出分辨率)。通常跟踪速度范围:
对于10bit,p=1024, | 跟踪速度范围:0~1040r/s |
对于12bit,p=4096, | 跟踪速度范围:0~260r/s |
对于14bit,p=16384, | 跟踪速度范围:0~65r/s |
对于16bit,p=65536, | 跟踪速度范围:0~16.25r/s |
实际的最大跟踪速度(TR)由电阻R₆值决定。VCO工作频率由经R₆的电流值决定,其比例系数是7900Hz/μA。R₆的电压是从积分器输出,即VELOCITY输出而来。假如设定在12bit分辨率下,最大跟踪速度为100r/s(即6000r/min)时,输出速度电压为5V。计算对应频率是100×4096=0.4096MHz,VCO需要的输入电流为
100×4096/7900μA=51.8μA因此采用R₆的值:
R₆=5/(51.8×106)kΩ=96kΩ
如果设计最大跟踪速度时,输出速度电压为±8V,可依下式计算最大跟踪速度(r/s):

这个计算值还不得超过参考信号频率的1/16。从计算的跟踪速度和速度电压,可以计算出速度电压斜率。例如,在100r/s(即6000r/min)时速度电压是5V,则速度电压斜率为

图8-13表示AD2S80A的一个典型应用电路,给出具体外围连接和元件参数。如图所示,它是12bit设置(SC1=0,SC2=1),选取参考频率为5kHz,带宽为520Hz,最大跟踪速度为260r/s。如前所述,由于跟踪型RDC是】型伺服环,在静态和匀速工作时,不会引入位置和速度误差。但在加速时会产生位置附加误差。此附加角度误差由转换器的加速度因数KA决定。

KA的值由R₄、R₆(Ω)和C、Cs(F)依下式确定:

将图8-13示例的数值;R₄=110ka,R₆=39kQ,C₄=1.5nF,C₅=6.8nF代入上式、计算得KA=2.7×10⁶s-2。
例如,在输入角的加速度为100r/s²时,引起输出角滞后误差为


2.AD2S81A/AD2S82ARDCAD2S82A与AD2S80A一样,是分辨率为10、12、14、16bit可选的单片RDC。不同之处在于AD2S82A有两个新的引脚:VCOOUTPUT和COMPLE-MENT,并采用44引脚PLCC封装。
AD2S81A是低成本的12bitRDC,采用28引脚DIP封装。这两种集成电路使用温度只有商业级的0~+70℃。
3.应用电路下面讨论与AD2S80A系列产品应用有关的几个问题。
(1)与较高电压自整角机和旋转变压器的连接:如前所述,AD2S80A系列内部没有输入变压器,标准的两路正余弦输入信号和基准信号电压均为2V(有效值)。它们与标准的较高电压自整角机和旋转变压器连接时,可借助于该公司的5S70系列和5S72系列隔离变压器,按图8-14方式连接。5S70用来连接自整角机时,从S1、S2、S3端输入,并将6脚和9脚短接,如图虚线所示。用来连接旋转变压器时,从S1、S2、S3、S4端输入。5S70有适应线电压为11.8、26、90V的不同规格,5S72有适应电压为11.8、26、115V的不同规格(均指基准频率为400Hz而言)。使用这两种隔离变压器的附加精度损失是1.5'。

如果系统连接无隔离要求,对大于2V的旋转变压器,可用电阻分压方法解决。对于自整角机,则可按图8-15方法,用运算放大器构成所谓固态SCOTT-T电路。建议使用型号为AD648(双运算放大器)、AD712(双运算放大器)、AD713(四运算放大器)等运算放大器。表8-9给出适应各种标准的自整角机电压推荐的电阻值。引入此电路也可改善输入到转换器的共模抑制比(CMRR)。如果所用电阻误差控制在0.01%内,CMRR典型值为80dB,最坏情况下,有68dB。由于电阻值存在一定的偏差,会使转换器精度有所损失。如果电阻值偏差为0.1%,由此电路带来的角度误差约为2'(典型值),最大约为7'。利用图8-15中COS输出接10圈的可变电位器作微调,调至两路信号平衡,可使精度损失减小。

表8-9计算电阻值(kΩ)
输入电压有效值/V | R₁ | Rz | R₃ | R |
2.0 | 11 | 12.7 | 22.6 | 11.3 |
11.8 | 11 | 12.7 | 133 | 66.5 |
26 | 11 | 12.7 | 280 | 140 |
90 | 11 | 12.7 | 1180 | 590 |
110(只用于基准电压) | 11 | 620 |
(2)利用AD2S80A作为SSCT:参照图8-10,如本节一开始已说明的,RDC内基本部分是SSCT。如果图8-12AD2S80A在37脚处断开,不连接为闭环方式,而只是从SIN、COSV的旋转变压器式信号,从数据端DB1~DB16输人数字角力,则从ACERRORO/P端(3脚)输出相当于控制变压器信号
2Asin(θ-p)sinwt式中θ-—旋转变压器信号输入角;
w——基准信号的角频率;A——增益,这里A=14.5。
对于(θ-φ),1bit的ACERROR输出电压(有效值)是

=178mV/bit(分辨率:10bit)44.5mV/bit(分辨率:12bit)11.125mV/bit(分辨率:14bit)2.78mV/bit(分辨率:16bit)为了使外面数据线的数字角中能从转换器的DB1~DB16输入,必须使用DATALOAD端(32脚),令其为逻辑0,将数据线上的数据装人计数器。为此事前先令ENABLE端(26脚)为逻辑1,使DB1~DB16呈高阻态,然后变为逻辑0,让数据锁存。
仿此,AD2S82A也可作为固态控制变压器使用。
(3)外接转数或节距数计数器:实际应用时,需要对旋转变压器的转数、感应同步器的节距数进行计数。利用外接计数器和-些门电路(见图8-16),即可实现此要求。图8-16中,RC(RIP-PLECLOCK)和DIR(DIRECTION)信号来自RDC。

(4)模仿增量编码器输出:光学或磁性增量式编码器通常输出两路正交的信号A和B、一路每转一个脉冲的标志信号MARKER。利用图8-17的电路,也可以将RDC输出信号改换成增量式编码器输出方式。利用最低位LSB、次低位(LSB-1)输出和BUSY信号,以及RC信号可获得此三路信息。而用DIR输出提供附加的方向信息。对于普通的增量式编码器,方向信号需另加外接电路由判断A与B的相位关系得到。
(5)用作感应同步器/数字转换器:以直线式感应同步器为例,它的定尺接收从OSC1758振荡器来的励磁功率。此振荡器是混合集成电路,产生两路相互正交的正弦波信号REF1和REF2。将REF1接内部功率放大后,由AMPO/P输出,送至定尺。振荡器频率由电容C和C₂决定,最高为10kHz,最大功率输出为1.5W。从感应同步器输出的两路信号.相当于旋转变压器输出的正弦和

余弦两路信号,但信号电平很低,通常是毫伏级,需要将它们预先放大,再输入给RDC。在图8-18的实用电路中,使用IPA1764混合式感应同步器专用前置放大器,提供信号的放大和必要的输出阻抗。它使用士15V电源。两通道放大器增益不平衡时会引入系统误差,因此要注意IPA1764增益偏差控制在0.15%之内,对于常用的节距等于2mm的感应同步器来说,只产生约0.23μm的附加误差。两路相位失配在1以内时,附加误差约为0.2μm。IPA1764两路输出阻抗小于30,具有驱动电容值达10⁴pF电缆的能力。因为直线感应同步器在机床上应用时,作坐标测量用的感应同步器与RDC之间有较远距离,需要用长电缆连接。感应同步器参考信号方到信号输出方的相移总是近于90°,利用OSC1758的另一个信号REF2作为AD2S80的参考信号从REFERENCE1/P输入,相位关系合适。并且,利用定尺回路串联适当的电阻(R),调节输入电流,满足定尺励磁电流的要求。在这里,采用带屏蔽的电缆线和正确接地是十分重要的。

(6)在双速粗精系统中的应用电路:在高精度角位置检测和随动系统中,常采用所谓双速(双通道)系统,将测量分辨率提高到20bit以上。测量用的两台旋转变压器经机械齿轮升速,如图8-19那样用32:1的齿轮比升速,低速电机称为粗机,高速电机称为精机,也可以使用所谓电齿轮方式,即多极旋转变压器(如32对极的)与一对极旋转变压器同轴组合。
在这个应用例子里,利用AD2S80A和AD2S81A分别作精机和粗机的RDC,利用74L.S83和一些门电路组合逻辑来综合两个转换器的输出。选择AD2S80A不同的分辨率(12、14、16bit),可得到合成的数字输出是17、19或21bit。

ANALOGDEVICES公司还生产TSL1612模块,它们是一种双速粗精系统处理器,适用于齿轮比(速比)为36:1.18:1,9:1的双速系统。
随便看看
- 2024-10-31液压油箱喷油的原因及防止措施
- 2024-09-19叶片泵-液压传动基础知识
- 2024-09-20产生电火花的原因
- 2024-09-18车体吊装要领-挖掘机运输篇
- 2025-01-02挖掘机液压系统常见故障的诊断与排除