
自整角机类控制电机 专用转换器集成电路
概述
基于电磁感应原理的自整角机类控制电机,如自整角机(Syn-chro,以下缩写为S)、旋转变压器(Resolver,缩写为R)和感应同步器(Inductosyn,缩写为1)等,原先主要用于航空、航天、舰船以及陆地军事装备中,如用于飞行器姿态控制和检测、导弹制导控制、火炮瞄准和控制、雷达天线跟踪等角位置伺服控制系统中,完成包括轴角位移或直线位移信息的检测、传输、接收和变换等功能。近年来,它们在工业机器人、数控机床、计算机辅助制造(CAM)、工厂自动化(FA)等方面得到越来越多的应用。自整角机类产品本来是模拟型机电元件,为适应测量系统、伺服系统数字化和普遍采用微型计算机或微处理机控制的要求,这些元件需要一定的接口电路,以实现自整角机类元件模拟量信号与控制系统数字量之间的相互转换。这些接口电路是一类特殊的模/数转换器或数/模转换器,这就是本章介绍的自整角机/数字转换器(SDC)、旋转变压器/数字转换器(RDC)、感应同步器/数字转换器(IDC)和它们的逆转换器。这些转换器早已由分立器件发展到小型固态厚膜或薄膜混合集成模块。近10年来,国外知名半导体公司又将其发展成为单片集成电路。这给应用带来很大方便。
常用的单相自整角机可分为力矩式和控制式,后者的分类和功能见表8-1。
旋转变压器简称为旋变,由于它可在模拟解算装置中作代数和、三角运算、矢量分解和合成、坐标变换等运算,故又有人称之为解算器。旋转变压器在位置随动系统中使用时,其作用与控制式自整角机相同,也可分为旋变发送机(代号:XF,RX)、旋变差动发送机(XC,RDX)和旋变变压器(XB,RT)。由于自整角机信息线是三根线,而旋转变压器是四根信息线,所以旋转变压器又称为四线自整角机。在角位移数据传输系统中,利用一种叫做“传输解算器”(Transolver,又称传输旋转变压器)的控制电机,可将三线自整角机信号与四线旋转变压器信号相互转换。
表8-1单相控制式自整角机的分类与功能
|
分类 |
功能 |
代号 |
|
|
中国 |
国外 |
||
|
控制式自整角发送机 |
将输入转角信号转换成三线电信号输出 |
ZKF |
CX |
|
控制式自整角差动发送机 |
电路上串接于发送机和控制变压器之间,本机输出的三线电信号反映发送机转角和本机转角的代数和 |
ZKC |
CDX |
|
控制式自整角控制变压器① |
接收三线电信号,转换成与失调角相对应的误差电信号输出 |
ZKB |
CT |
注:失调角是三线电信号代表的转角值与自整角控制变压器的转角的差值。
①也可称为控制式自整角变压器。
SDC和DSC等专用集成电路或模块的出现,一方面可使用此技术形成所谓固态自整角(旋变)发送机、固态自整角(旋变)差动发送机、固态自整角(旋变)变压器等新元件,成为一部分机电型自整角机类产品的代用物,并与之竞争;但另一方面,却为机电型自整角机类产品注入新的生命力,在控制系统数字化潮流中仍能发挥其固有的优势,增强了它们与其他数字型位置传感元件(如光学绝对式或增量式编码器、磁性编码器)进行竞争的能力。
感应同步器是一种高精度角位移和直线位移检测元件,分为旋转式或直线式两大类。它们的工作原理与多极旋转变压器相同通常工作于发送机或变压器方式。在应用感应同步器/数字转换器时,感应同步器工作于发送机状态。
SDC类产品主要可分为三大类,其功能、分辨率与一般精度水平见表8-2。在这些转换中,角位移(轴角)量常以自然二进制数为代码,它们的权见表8-3。
表8-2自整角机/数字转换分类
|
分类 |
主要功能 |
分辨率/bit |
精度水平/() |
|
自整角机/数字转换器(SDC)旋转变压器/数字转换器(RDC)感应同步器/数宇转换器([DC) |
将控制式自整角发送机三线输出信号、旋变发送机四线输出信号、感应同步器发送机工作状态输出信号转换成代表转角或直线位移的二进制数码 |
10
12
14 16 |
士21士8.5士5.3士2.6 |
|
数字/自整角机转换器(DSC)数宇/啶转变压器转换器(DRC) |
将输入轴角代码(二进制)转换成对应的三线自整角式或四线旋变式的模拟量输 出,此输出等效于控制式自整角发送机或旋变发送机输 出,故又称为固态自整角(或旋变)发送机 |
12 14 |
土8士4 |
|
固态自整角(旋变)变压器 固态自整角(旋变)差动发送机 |
接收三线自整角机或四线旋转变压器信号,输入表示轴角的二进制代码,转换成自整角变压器或旋变差动发送机模拟电压的输出 |
10 12 14 16 |
土30土15士4士2 |
表8-3轴角自然二进制代码的权
|
bit |
用度表示 |
用度和分表示 |
用弧度表示 |
|
|
(°)() |
C') |
rad |
||
|
1 |
180 |
180 |
0 |
3.141593 |
|
2 |
90 |
90 |
0 |
1.570796 |
|
3 |
45 |
45 |
0 |
0.785398 |
|
4 |
22.5 |
22 |
30 |
0.392699 |
|
bit |
用度表示 |
用度和分表示 |
用见度表示 |
|
|
(°) |
(°) |
(') |
rad |
|
|
5 |
11.25 |
11 |
15 |
0.196349 |
|
6 |
5.625 |
5 |
37.5 |
0.098175 |
|
7 |
2.8125 |
2 |
48.75 |
0.049087 |
|
8 |
1.40625 |
1 |
24.38 |
0.024544 |
|
9 |
0.70312 |
42.19 |
0.012272 |
|
|
10 |
0.35156 |
21.09 |
1.006136 |
|
|
11 |
0.17578 |
10.55 |
G.003068 |
|
|
12 |
0.08789 |
5.27 |
0.001534 |
|
|
13 |
0.04395 |
2.64 |
0.000767 |
|
|
14 |
0.02197 |
1.32 |
0.000383 |
|
|
15 |
0.01099 |
0.66 |
0.000192 |
|
|
16 |
0.00549 |
0.33 |
0.000096 |
|
这些轴角转换器模块或集成电路已经商品化。在国外,如ANALOGDEVICES、MEMORYDEVICES、DDC的ILCDataDevice、ComputerConversions、NatelEngineering、Transmagnet-ics、CotrolSciences等公司是主要的供应厂商,有完整的系列产品。有些自整角机、旋转变压器生产厂商,例如英国的MuirheadVactricComponeents公司也有自己的固态转换器模块,以方便用户配套使用。
8.2固态型自整角变压器和固态差动自整角发送机如图8-1a所示,机电型自整角变压器(CT)的定子绕组三个端子S₁、S₂、S₃通常与控制式自整角发送机(CX)输出的三条线连接,后者送来的一组自整角式轴角信号是:
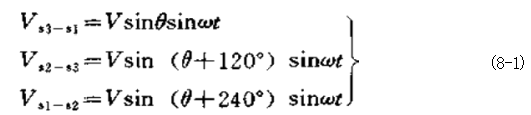
此组信号代表了需要传输的发送机轴角θ信息。w是加到发送机转子绕组两端参考电压VR的正弦波调制频率。若此时,CT自身的轴角为φ,从其转子绕组两端R,、R₂会输出一个由参考频率f,调制的电压信号,它的幅值正比于sin(0-φ)。式(8-1)中w=2πfr。

固态自整角变压器(SSCT)与机电型自整角变压器(CT)有相似的功能。它同样接收代表输入模拟轴角θ的S₁、S₂、S₃三线自整角式模拟量信号,同时输入一个数字化的轴角代码φ。它通常是并行自然二进制数码(10~16bit)。SSCT的输出也是一个由参考频率fr调制的电压信号,其幅值正比于sin(8-p)。
固态自整角变压器原理框图见图8-2。三线自整角机信号S₁、S₂、S₃输入到一特殊的变压器(称为SCOTT-T变压器),进行信号隔离和变换。SCOTT-T变压器实际上是两个高精度小型变压

器,其原理图见图8-3。这两个变压器之间应完全没有磁耦合,每个变压器静电隔离完全相同,有良好原副方线性关系,漏抗很小。选择正确的变比和线圈的抽头,使得SCOTT-T变压器从原方输入自整角机三线电压信号可精确地转换为副方的四线旋转变压器式信号:
Vs₃-s=V₂sinθsinat
Vs2-s+=V₂cosfsinwt

SCOTT-T变压器也可以将原副方反过来使用,从四线输入旋转变压器式正余弦信号,从三线输出自整角机式信号。总之,SCOTT-T高精度变压器可用作自整角机/旋转变压器信号转换器,而且此种转换是可逆的。由于采用此种转换技术,使下述的固态自整角机、DSC、SDC与固态旋转变压器、DRC、RDC有完全相同的主要环节。例如,在这里所说的SSCT-T,首先将自整角机式信号转换成旋转变压器式信号,然后才进行其他运算和转换。下面还要谈到的SCOTT-T变压器转换也可以由电子电路实现。
SCOTT-T变压器输出的四线旋转变压器式信号被送至“象限转换开关”。在此,由输入的数字角中的前两位(最高位MSB和次高位)控制,确定输入轴角θ所在的象限,以便确定后面两个函数发生器输出信号的极性。在正余弦乘法器中,输入数字角中经正弦和余弦函数发生器转换为sinp和cosp,在带乘法的DAC中运算,得到cosθsinp和sinθcosp。将它们送入减法放大器,进行下式运算:
sinBcosp—cosθsinp=sin(θ-φ)
最后,这个被参考频率f.调制的信号经隔离变压器输出,从而完成了与机电型CT相同的功能。在闭环位置伺服系统中使用时,由于(θ-)总是逐步趋向于零,所以有sin(θ-φ)≈8一φ
例如,(θ-Ø)在±7°以内时,此近似式只带来几个角分的误差。
如果将图中SCOTT-T变压器的位置用两个隔离变压器代替,输入信号是旋转变压器四线信号的话,这个框图就变为固态旋变变压器(SRCT),可用来完成机电式旋变变压器的功能。
SSCT是下述固态自整角差动发送机的基本组成部分。SSCT的主要组成也是后述DSC、DRC和SDC、RDC的基本组成部分。

机电型控制式自整角差动发送机(CDX)见图8-4。它的定子三绕组接收从CX来的三线自整角信号,它们代表了输入指令角θ。当向CDX输入轴角φ时,从转子绕组R、R₂、R₃输出另一组三线自整角信号,和式(8-1)相似,不同的仅是以(θ-φ)代替θ。换言之,CDX的作用是将代表θ角的三线自整角式信号转换成代表(θ-φ)的三线自整角式信号,实现了轴角量的和或差运算。
固态控制式自整角差动发送机(SSCDX)的功能和机电式CDX相似,也用来实现轴角信息传输和(θ-p)的和差运算。不同的是,$为数字式输入角。现有产品中输出的是(θ-φ)的四线式旋转变压器信号,见图8-4b。
从图8-5SSCDX原理框图可知,它相当于有两个SSCT,但它们共用一组输入隔离的SCOTT-T变压器和象限选择开关。而且两个SSCT中sin和cos信号输入互换了位置,由乘法器和减(加)法放大器完成了下列运算:
sinθcosp-cosθsinp=sin(0-)
cosfcosp+sinθsinp=cos(0-φ)

实际上,此四线旋转变压器式信号仍是由参考频率f,调制的。此两信号尚需经功率放大器输出.以得到适当的电压幅度和足够的输出功率,方能驱动后面的旋变变压器。显然,也可利用SCOTT-T变压器作为输出变压器,转换为三线自整角发送机式输出,也可以驱动自整角变压器。
由DDC的HLCDataDevice公司生产的HSCDX-14是一种14bit的SSCDX模块组。它出两块SSCT模块组成,每块都是36脚双列直插式模块。一块是正弦输出的SSCT,按其接收的输入轴角信号是三线自整角式信号,还是四线旋转变压器式信号,还是电压跟随器输入的不同,产品型号分别称为HSCT、HRCT、HXCT。另一块是余弦输出的SSCT,产品型号称为HCCT。14bit数字角输入是TTL/CMOS电平兼容。HSCDX-14的一般精度为±4',高精度的达±2'。调制频率为17~1000Hz,最大输出(有效值)为1V,最大负载能力为1mA。动态性能:对于179°阶跃输入,到达最终精度的建立时间为10μs。按照美国军用标准MIL-STD-883计算的平均故障间隔时间(MTBF)为610000h。ComputerConversions公司生产专门的SCT系列固态自整角变压器和SCDX系列固态自整角差动发送机。其中SCT系列包括14bit的SCT40、SCT60.12bit的SCT412、SCT612,10bit的SCT410、SCT610。它们的精度依次为4'、15和30'。SCT4××系列的工作频率为400Hz,SCT6××系列的工作频率为60Hz。输出角度范围为±7°或士12.5°输出电压梯度为0.4或1.oV/C)可选。输出有短路保护。该系列也有固态旋变变压器(SCTR)产品,可接收旋转变压器式输入信号。而SCDX系列包括14bit的SCDX40、SCDX60,12bit的SCDX412、SCDX612,10bit的SCDX410、SCDX610。它们的精度依次为4'、15'和30'。它也有接收旋转变压器式四线信号的固态旋变差动发送机(RCDX)产品。
NatelEngineering公司生产16bit的HRCT/HSCT3006系列固态控制变压器,精度有1'、2'、4'三种。还生产16bit的HCDX3106系列固态自整角差动发送机,精度有2'、4'、8'三种,工作频率可达5kHz。
典型的机电式角位置伺服系统见图8-6。图中,VR是参考电压,从机电式自整角发送机转子绕组输入,定子的三线输出接到自整角变压器的定子绕组。轴角6N是指令位置角,8o是与电动机、机械负载连接在一起的CT的轴角,是被控制的输出角。CT转子绕组输出信号正比于sin(θN-θo),经相敏解调和放大校正后驱动伺服电动机M。闭环控制的结果,使θo=θN,实现远距离的两个轴角的跟踪、同步、复现。

此机电型系统可以用机电-电子混合角位置何服系统代替。其中一个方案见图8-7。图中,SSCT为接口电路,从数字计算机接收数字的指令角信号θn,另外,与机械负载和电动机同轴安装的被换成一台机电式自整角发送机,将输出轴角0o转换成三线自整角式信号,也作为SSCT的输入。这样,SSCT的输出表示了θIN和θo的误差,此误差也经相敏解调和放大,驱动何服电动机M,同样达到θo对N跟踪的目的。

此例子说明,SSCT和CT一样,在闭环伺服系统中常用作角位置误差发生器。SSCT则使用于数字计算机控制的系统中,将数字角和自整角(旋转变压器)式电压表示的角度进行减法运算。同样,固态自整角差动发送机也用来进行类似的数字角与模拟角之间的减法运算,适用于数字计算机用数字角对自整角机或旋变发送机输出信号进行角度的补偿或校正。
随便看看
- 2024-12-26柴油机排气异常故障分析
- 2024-11-11四冲程发动机
- 2024-09-19液压缸的安装形式-液压传动基础知识
- 2024-09-20卡特CAT320挖掘机-故障代码
- 2024-09-20日立故障代码0164-11:喷油驱动压力传感器机械故障