
多田野GT55OE系统的构成和功能
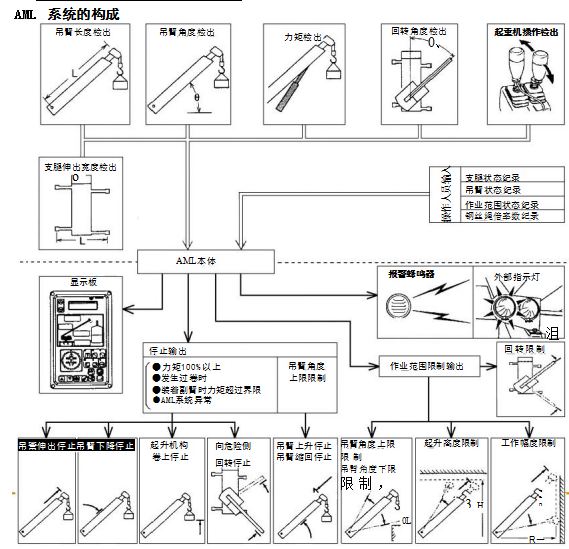
AML系统的构成和功能
(1)超载时的自动停止功能
当作业力矩超过额定力矩(100%以上)时,显示故障信息,报警蜂鸣器鸣响,起重机的危险侧的动作停止。
◆ 其AML 系统的综合精度为±5%以内。
(2)吊臂角度上限限制的自动停止功能
在吊臂作业或臂端单滑轮作业中,为了防止副臂与吊钩或钢丝绳接触,在下述的场合输出信号和报警声,使吊臂上升和吊臂缩回动作停止。
· 吊臂伸出量在大约2m 以下的状态,吊臂角度上升到大约76°以上时。
· 吊臂角度处于大约76°以上的状态,吊臂伸出量缩短到大约2m 以下时。
(3)作业范围限制功能
(4)缓停止功能
在以下的场合,当吊臂变幅接近停止位置时,缓缓地降低速度并停止。
◎:缓停止 O:停止
超载时的 自动停止 | 起升机构的卷上 | O |
吊臂的下降 | ◎ | |
吊臂的伸出 | O | |
回转 | O | |
吊臂角度 上限限制 | 吊臂的上升 | ◎ |
吊臂的缩回 | O | |
行程端头 停止 | 吊臂的上升、下降 | ◎ |
作业范围 限制停止 | 吊臂的上升、下降 | ◎ |
吊臂的伸出 | O | |
回转 | O |
◆当变幅缓停止解除开关切换到OFF 时,吊臂上升、下降的缓停止功能被解除。
◆当回转停止解除开关切换到OFF 时,回转不能自动停止。
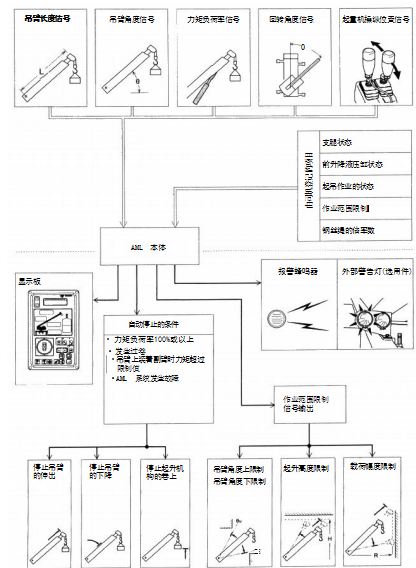
![]() AML 系统的构成和功能GT35OE、GT25OE
AML 系统的构成和功能GT35OE、GT25OE
AML系统具有包括以下三种典型功能在内的数种功能。依据由司机选择登记 的作业状态和各检出器输入的信号,对起重机的动作实施控制。
(1)防止超载的自动停止功能
AML对作业力矩和额定力矩进行比较计算,并显示其比值。当作业力矩 超过额定力矩(100%或以上)时,显示故障信息,报警蜂鸣器鸣响,起重机 向危险侧的动作停止。
◆AML的系统精度为±5%。
(2)防止过卷的自动停止功能
吊钩过卷时,显示故障信息,报警蜂呜器鸣响,起重机向危险侧的动 作停止 。
(3)作业范同限制功能
当任何作业范围的限制登记在AML上时,起重机受控,使起重机的姿态 不会超出此作业范围的限制。当起重机到达登记的限制位置时,显示故障 信息,蜂鸣器鸣响,起重机停止动作。
随便看看
- 2024-11-13新型冲击器的工作原理
- 2024-11-01液压系统卸荷回路
- 2024-12-06节流阀的故障排除与修理
- 2024-12-27发动机维修中的几种简单方法
- 2024-09-14接头和液压软管的紧固扭矩-挖掘机点检整备篇