
分散型系统和集中型系统
|
分散系统 |
集中型系统 |
|
|
快速性 |
可进行局部处理,且响应迅速 |
由于必须向中央计算机中存取数据,所以速度较慢。 |
|
多样性 |
能容纳各种特性不同的构成要素. |
单一性的。 |
|
可靠性 |
局部故障不会影响整体, |
中央处理机的故障为致命故障. |
|
灵活性 |
系统扩充、更改容易。 |
一且系统构成,很难再扩充或变更。 |
分散型系统的基本规范![]() 现将以上设想从成本角度出发,重新进行一些定量分析。现在我们来考虑图6.3所示的最简单的信息系统,它是一种双层模型。图中白圈代表计算机,箭头代表信息通道。在这一系统中,当我们处理信息量I时,假设信息是从下位往上位走,下位第一层中每个计算机处理的信息量为(*表示每一台计算机),合计被处理的信息量为=2i*,余下的信息量I一i由上位的第二层进行处理。
现将以上设想从成本角度出发,重新进行一些定量分析。现在我们来考虑图6.3所示的最简单的信息系统,它是一种双层模型。图中白圈代表计算机,箭头代表信息通道。在这一系统中,当我们处理信息量I时,假设信息是从下位往上位走,下位第一层中每个计算机处理的信息量为(*表示每一台计算机),合计被处理的信息量为=2i*,余下的信息量I一i由上位的第二层进行处理。
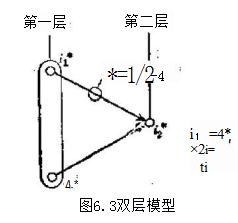
系统成本是由处理用计算机的成本Cp和传送信息的成本Cr构成,计算机的成本与它所处理的信息量的m次方成正比,通信成木与通过它传送的信息量(即未处理的信息量)成正比的。这就是说,如果把第i层中每台计算机的成本设为Cp*,又假设
C;*一a(ij*)m(j=1,2)(6.1)
则i*=1—2i*。如果下位计算机向上位计算机传送信息的成本用Cr*表示,则
Cr*=b(1/2-i*)(6.2)将这些量加起来,就可以评价系统的成本了。全部成本C可以写成;
C—2Cp*+Cp*+2Cn*
=a((I—2*)m+2(计)*)+b(1—2详)(6.3)
式中a,b为计算成本时的比例常数。
首先,以m为参变量,将公式(6.3)的第一项(计算机成本)作为理的函数,用图6.4中的虚线表示。第一项再加上第二项(通信成本)时,就要将图中虚线与左方上升的直线相加,于是合成曲线也随之向左上方逐渐升高,如图中实线所示。这一结果,揭示了下列重要结论:
(1)m>1时,即计算机成本还没有发挥出规模性的经济效益时,图中曲线具有最小值,这时可望向各阶层分配适量的负荷,以形成阶层型构造(分散1).
(2)m<1时,因为图中曲线没有最小值,所以还需要进行
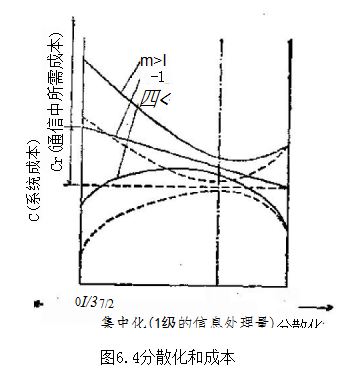
若于考察。当通信成本比较小时,将负荷集中到上位计算机(集中)的构造是最恰当的。
(3)另一方面,随着通信成本加大,如图6.4所示,图中曲线向左上方升高,当达到某一界限之上时,采用下位计算机担负全部负荷(分散II)的构造为佳。
总之,如上所述,可以知道“以成本为出发点的系统,变成为分散型系统,其机械装置,根据其依据的是计算机本身成本或依据通信成本的不同而具有两种构成方法,这两种方法都可以根据机械装置而进行分散,但由于方法不同,形成的系统构造相差很大”。
这里的参数m,如上面所示,可以看作为表示计算机性能和成本之间关系的特征量,即可以看作为成本曲线形状的特征量另外系统通信成本的大小,可以用下式定义的参数X表示:

简单计算结果表明,对于上述模型,给出最小成本的构造仅由X和m决定。即上述(1)—(3)的说明,可概括到图6.5中。下面我们还要就此图作进一步说明。
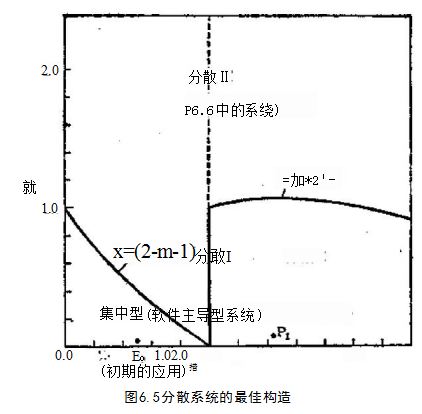
机械电子控制系统的构造根据图6.5,我们可以对各种条件下的系统的最佳构造,进行一些根本性的讨论。首先考虑X轴,当X变大时,让下位计算机担负大部分负荷的分散Ⅱ的构造为最佳。但X值增大时,意味着系统在空间上随之扩大,或者意味着计算机成本降低,通信成本相对增大。对于向空间广泛范围扩大了的测量系统,许多台小型计算机,大多可以按后面将要叙述的那种不分上(上位机)下(下位机)关系的网络相结合。总之,所谓分散IⅡ正是以通信成本作为原因而分散的。
选择分散Ⅱ的理由,是由于把计算机分散后,系统内部传送信息的量可以减少!即是从表面上也能看出,这时一条信道可以进行多次应用,从而达到其它方法不能达到的目的,即大幅度地简化布线。近年来,控制器管理的项目不断增加,传感器与计算机或者计算机与执行器之间的信号线越来越多,所以在总经费中布线费用占有较大比例,从这一点看,分散Ⅱ的构造是比较有利的。
图6.6是一个通过改变计算机台数进行试验性设计的例子,
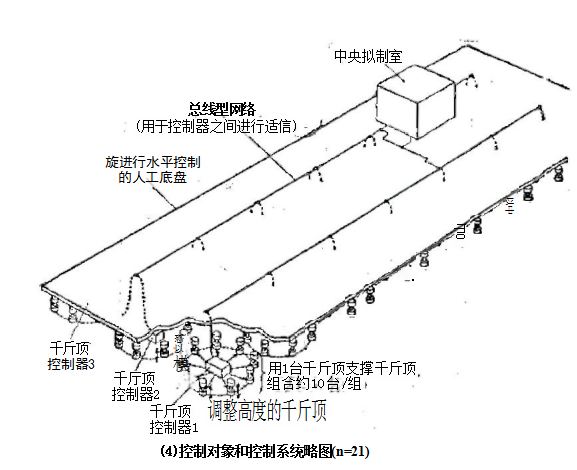
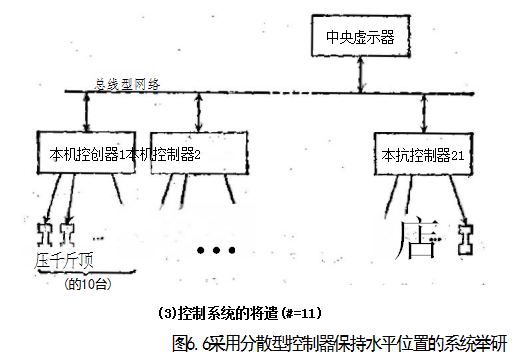
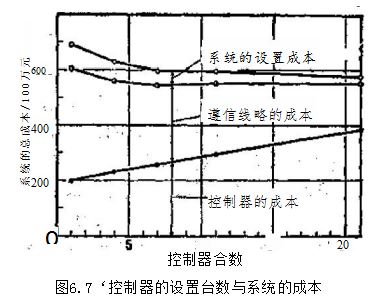
它是一个用200台油压千斤顶,对50米见方的底盘进行水平调整的自动控制系统。随着计算机台数的增多,布线趋于单纯化和简单化。事实上,如果从成本上考虑,各种设计例子就会象图6.7那样,随着计算机台数的增加,虽然计算机成本增加,但是由于布线成本减少的更多,所以系统总成本是下降的。顺便提一下,这一系统的(m,X)若画到图6.5上,就是所谓P₂那一点。
由于计算机成本每年都在下降,所以现在很多人认为,即使是在飞机或汽车等比较小的系统中,分散的设想也是行之有效的.把飞机和船舶内的信息处理部分分散在各部分中,然后把它们用数字数据环连接成系统,这种设计已开始在实验中采用。汽车方面虽然还未达到这一步,但是如能将电子设备间的布线合理配备

(调整约200台千斤顶冲程》以保持底盘水平的系统)
则除了对降低噪音、减少故障等方面有利以外,也会使硬件单纯化,从而使批最生产这一优点得以发挥。人们很难设想,各飞机制造商从一开始,就对许多汽车制造商的单线化布线方法进行着研究。
机械电于学系统的设计与纯粹的电子学系统的设计相比,其根本不同点在于它的空间性。为了更好地发挥前面所叙述的CCV概念的真正效果,在上述意义上,可以认为现在的机械电子机器的设计尚有许多改善的余地。
下面让我们再研究一下参数m。假设计算机的成本按照Grosch法则计算.因为所谓Groscl法则是遵循计算机成本仅随其功能(运算速度)的平方根成正比地增大这一经验法则,所以现在设m=0.5是可以的。最初的计算机的应用,因为没有设计成太大规模的系统,所以在图6.5中为Pu位置,集中型的构造是最合适的。但不是所有的计算机都可以按Grosch.法则进行。与此相比,最近新出现的微处理机显然更具有良好的成本-性能比。近年来,多微处理器系统研究的蓬勃开展,充分说明了这一趋势。
特别是随着硬件的廉价化,就更趋向于由软件成本起决定性作用了。软件成本与硬件成本有着根本不同的特点,硬件成本具有规模上的经济性(Grosch法则也是其一),而软件的成本特性不
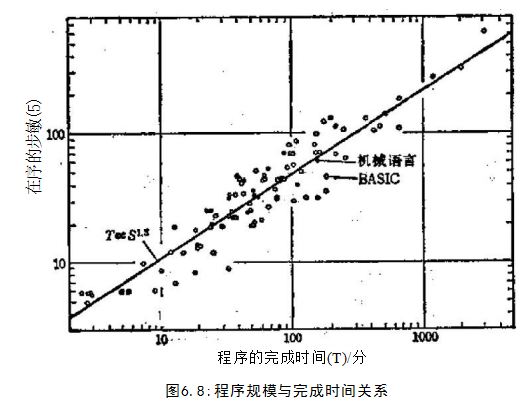
具有规模上的经济性,随着要处理的信息积累的增加,软件编写的难度也就急剧增大,超过一定的限度,可以说软件的编写就会遇到不可克服的困难。图6.8是一个程序的步数和完成时间的关系实例,反过来如果将步数看作性能指标,时间看作成本指标的话,此时就m值讲,软件成品的m值要增加到1.3—1.5倍。此时是在图6.5的P₁位置,其最佳构造是分散I,即阶层型的分散。其反面之*一,意味着多数情况下,希望软件具有阶层型构造,作为纯粹的软件语言,这种设想如后面要阐述的那样与构造化语言形式相结合,但是每个软件功能块都要有相应的硬件相对应,此外把程序固化也是一个方向。对于处于研究阶段的极其高度化的智能机器人系统来说,这种具有阶层型执行器的系统在日益增大。
随便看看
- 2025-01-15起升机构操作GT55OE操纵装置(TADANO配置方式)
- 2025-01-13CumminsCelect系统
- 2024-09-13挖掘机车辆各部件的名称-挖掘机驾驶装置篇
- 2024-11-04液压伺服系统的动态特性
- 2024-09-19节流阀-液压传动基础知识