
UAA4002GTR基极驱动和保护集成电路
UAA4002是法国汤姆森半导体公司(THOMSONSEMI-CONDUCTORCOMPANY)于1984年前后开发并投放市场的,
封装于CB-79芯片上的塑封16引脚双列直插式集成电路。它的设计体现了对功率晶体管的最优基极驱动和其完整快速的综合保护这两个双重要求功能,实现了对被驱动的功率晶体管“主动分散保护”这一新概念。无论晶体管的应用环境多么恶劣,都可使晶体管设备的性能明显改善。UAA4002完善的设计使其可对被驱动的功率晶体管实现过电流、最大导通时间、最小导通时间、欠饱和、过饱和及驱动电源正负电压欠电压保护和芯片自身工作温度的检测和保护等功能,
1.UAA4002的主要设计特点
(1)UAA4002可为用户脉冲形成部分与被驱动的功率晶体管之间提供理想的匹配,它是一个智能接口,其输入与TTL电平及CMOS电平均兼容,其输入信号与输出信号之间的延时时间可人为调节。
(2)能把接收到的、以逻辑信号输入的功率晶体管的导通信息,转变为加到功率晶体管上的基极电流,来保证开关晶体管运行于临界饱和的最佳状态时,从而显著减少了开关晶体管关断过程中的存储时间。UAA4002可为开关晶体管提供一个最大为0.5A的正向基极驱动电流,且电路自身的设计保证了这一电流值可以通过增加一个或几个外部晶体管加以放大。
(3)UAA4002可为开关晶体管提供一个幅值为3A的反向基极电流,这一电流值足以使晶体管快速关断,保证了晶体管集电极电流的下降时间极短,从而显著减少了关断损耗。同样,反向基极电流亦可增加一个或几个外部晶体管来放大。
(4)UAA4002应用封装于它内部的高速逻辑处理器来保护开关晶体管。在晶体管导通过程中,该处理器监控晶体管的集射结饱和压降和晶体管的集电极电流,同时也监控本集成块工作的正负电源电压和芯片的工作温度。该逻辑处理器的最大和最小导通时间可由用户设定。此外,在功率晶体管导通过程中,若发生任一非正常情况,UAA4002就存储了错误的信息,并将其存储到该导通周期末,这样就避免了任何可导致晶体管“重新开通”的可能。
(5)UAA4002的有些功能是可删除的,用户可根据实际需要取舍。
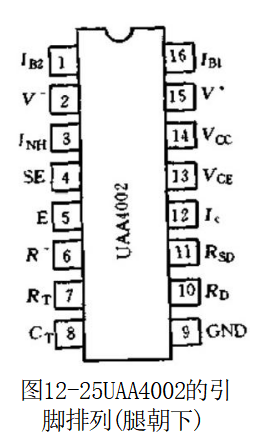
2.引脚排列、名称、功能和用法UAA4002为标准双列直插式16引脚封装的集成电路,它的引脚排列见图12-25。各引脚名称、功能和用法叙述如下:
(1)输出端:引脚1是反向基极驱动电流输出端。当UAA4002用来驱动电流容量为50A以下的达林顿晶体管时,该脚直接与被驱动的功率晶体管的基极相连接;而当UAA4002经功率放大后用来驱动容量大于50A的达林顿晶体管时,该端与功率放大单元第一级的PNP晶体管基极相连。引脚16(IB₁)是正向基极驱动电流输出端,当UAA4002用来直接驱动电流容量小于50A的功率达林顿晶体管时,该端通过一个外接电阻Rs与被驱动的功率晶体管的基极相连接,而当UAA4002用来经功率放大后驱动电流容量大于50A的功率晶体管时,该端通过一外接电阻接功率放大级第一个NPN开关晶体管的基极。
(2)控制端:引脚7(R)为UAA4002内部偏置电流与逻辑处理器工作时间设置端,可通过一外接电阻r接地,电阻r的大小在UAA4002的工作中起着重要的作用,它决定该集成块工作偏置电流I的大小和UAA4002的其他外围参数以及UAA4002
内部逻辑处理器的最小导通时间taic和最大导通时间fomax。
I=5/r(kQ)(mA)
fonnin=0.06×rT(kΩ)(μs)
为了确保功率晶体管开关辅助网络的电容充分放电,逻辑处理器应确保输出脉冲有一最小脉宽tonmin,因此tomn必须至少为RCD网络时间常数的四倍。
引脚8(Cr)是UAA4002的最大导通时间tonmx设置端,通过
一外部电容CT接地。tonmm对UAA4002的可靠安全正常工作有重要的作用,在每次导通周期开始时,Cr由一恒流I/2充电,当CT两端的电压达到5V时,逻辑保护单元便停止输出高电平脉冲。如通过斩波器电路来限制功率传递或防止UAA4002工作于脉冲模式时,因传输信号中断而引起被驱动的晶体管的错误持续导通。lmmex与CT的大小有关系,即
tonmax(μs)=2rt(kΩ)CT(μF)×10-³。
tonma功能可通过短接电容Cr删除。
引脚4(SE)是工作方式选择控制端,随着在该端施加信号的不同,UAA4002有“电平”和“脉冲”两种不同的工作模式。若在SE端加一逻辑高电平或通过阻值最小为4.7kQ的电阻把该端接到正电源,则UAA4002被置为电平工作模式,UAA4002的脉冲工作模式,可通过在SE端施加一交变脉冲信号,或在该端接一逻辑低电平,或把该端直接接本集成块工作的地端(9脚)来实现。
引脚3(INH)为删除或降低功率晶体管导通能力控制端,在UAA4002内部集成有一个可储存被驱动的晶体管导通期间所产生的任何删除信息,直到下一个驱动导通的脉冲出现的RS触发器,引脚3与CMOS和TTL电平均兼容,在该端接一逻辑高电平时,则可停止被驱动晶体管的导通,若在该端接一逻辑电平高低相间的脉冲信号(最小脉宽不小于100ns),则可降低被驱动的开关晶体管的导通能力,对系统中不需用此功能时,可将该端接地来删除。
引脚10(Rp)为延时控制端,其功能为UAA4002的输出与输入信号前沿之间提供1~12μs的延时,可通过外接电阻rp接地来实现此功能。延时功能避免了在若干个晶体管的顺序控制中所有晶体管同时导通的危险。在不需要延时功能的场合,可通过把Ro端接正电源Vcc来删除,延时时间To的大小与外接电阻ro的大小有关,即
To(μs)=0.05×rp(k2)
(3)输入端:引脚6(R-)是负电源电压监控保护动作门槛电平设置端,通过外接电阻r-与负电源V-相连,随着负电源电压的绝对值|V-|的大小不同,可选取不同的外接电阻r-(反之亦然)。若负电源电压的绝对值V|-|<VR,则该集成块内部的逻辑处理器便自动封锁UAA4002的输出脉冲,对负电源电压的监控,避免了在UAA4002的脉冲工作模式下,因负封锁脉冲幅度不够,而导致功率晶体管持续导通的危险,保证了功率晶体管的正确开关。电压VR的大小可用下式表示:
为了保证本集成块的内部电路VR为5V的恒值,就必须要负电源电压最小值为:
负电源电压的监控功能可通过把R-端直接接地或负电源V-来删除。
引脚13(VcE)是被驱动的功率晶体管集电极发射极间电压检测输入端,通过一正极接到该端,而负极接到功率晶体管集电极的二极管与被驱动的晶体管相连。当晶体管导通时,该二极管导通,VcE上的电压与晶体管集射极电压相同,当晶体管关断时,二极管也关断,VcE上的电压与该集成电路的正电源电压Vα相同,在晶体管导通期间,一个比较器监控管脚VcE上的电压。当功率晶体管的集射结电压Vc大于11脚(Rsp)设定的电压VRsp时,则UAA4002的内部逻辑处理器便通过封锁其输出脉冲来保护功率晶体管,因而可对功率晶体管进行任何欠饱和保护(如基极驱动电流不足或集电极电流过载引起的晶体管的欠饱和)。11脚(Rsp)为被驱动的功率晶体管退饱和保护门槛设置端,该端设置的门槛电压决定着被驱动的功率晶体管欠饱和的动作门限,其门槛值的高低与该端到地之间所接的电阻rsa的值有关系:
当该端悬空时,则UAA4002内部就自动地把欠饱和门槛电压设置为5.5V,在不加外部电路的条件下,欠饱和保护的最高门槛电压为5.5V,欠饱和保护功能可通过直接将RsD端接负电源V*来删除。
引脚12(I)是功率晶体管集电极电流限制保护输入端。该端直接接到晶体管发射极的分流器或电流互感器的一个输出端(其另一端接地),UAA4002内部的比较器对此端输入的电流进行监控,一旦其大于设定值,则UAA4002内部的逻辑处理器便通过封锁UAA4002的输出信号来停止功率晶体管的导通,从而对晶体管进行过电流保护。若不用时,可把I。端直接接地来删除。
引脚14(Vcc)是正电源电压监控输入端。该端与正电源输入端Vcc共用,此监控功能是不能被删除的,且UAA4002的内部电路结构保证了当UAA4002的正电源电压低于7V时,其内部逻辑处理器便封锁UAA4002的输出信号来停止功率晶体管的导通,从而对晶体管进行过电流保护。若不用该保护时,可把I。端直接接地来删除。
引脚5(E)是功率晶体管的基极驱动信号输入端,接光耦合器或脉冲变压器的二次侧,通过光隔离或脉冲变压器来实现与脉冲形成部分的隔离,在电平工作模式下,E端信号的脉冲宽度应不小于300ns,在脉冲工作模式下,E端信号正负脉冲的幅度必须大于±2V而小于电源电压的绝对值Vc和|V-|,且正负脉冲的宽度都必须大于100ns。
(4)电源端:引脚14(Vcc)是正电源电压输入端,通常取10~15V。
引脚2(V-)是负电源电压输入端,负电源电压的合适值为—4~-5V,在没有负电源的场合,可通过一正极接UAA40029脚(地端),而负极接于该端和正电源地的二极管上的反偏压来代替。
引脚15(V+)是UAA4002输出级电源输入端,通过一个外接电阻接到正电源Vc。
(5)地端:引脚9(GND)是提供整个UAA4002工作的参考
地电平。
3.内部结构及工作原理简介UAA4002的内部结构及工作原理简图见图12-26。从图可显见,在UAA4002的内部集成有自身工作电源电压Vcc检测及V检测的两个单元、一个输入接口逻辑、一个逻辑处理器、一个输出脉冲最大导通时间ton(max)和一个输出脉冲最小导通时间to(min)设置单元、两个用来进行过电流或欠饱和保护的比较器、一个正向输出脉冲放大与一个负向输出脉冲放大网络。

UAA4002的工作原理可简析为:来自用户的控制脉冲形成单元的脉冲,经UAA4002内部的输入接口电路,根据其4脚的电平高低所设定的工作模式,实现匹配后提供给逻辑处理器,假设进行欠饱和保护及过电流保护的两个比较器都未翻转,也就是说被驱动的大功率晶体管未发生欠饱和及过电流等故障,则逻辑处理器根据用户在其10、8和2脚所设定的延迟时间,以最大或最小脉宽输出对应的正向驱动脉冲,该驱动脉冲经集成于UAA4002内部的正向末级功率放大晶体管放大后,向被驱动的功率晶体管的基极提供合适、足够的正向驱动电流和电压,确保被驱动的功率晶体管运行于临界饱和的最优状态,从而减小被驱动的功率晶体管的工作损耗,提高其开关频率,实现最佳驱动。一旦发生过电流或欠饱和故障,则UAA4002输出级中的下端晶体管导通,负电源电压加到被驱动的功率晶体管的基极,从而产生一幅值较高的负基极电流IB₂,迅速抽出存储在被驱动晶体管基射结的电荷,使被驱动的功率晶体管快速关断,保证被驱动的功率晶体管不会损坏。另一方面,若发生用户系统故障,则外保护电路翻转,只要UAA40023脚得到一高电平信号,则逻辑处理单元输出便为低电平,此时UAA4002仅向被驱动的功率晶体管提供负向驱动电流和在被驱动的功率晶体管基射极之间加一负偏压,确保被驱动的功率晶体管处于可靠截止状态,防止任何可导致其导通损坏的可能。
4.UAA4002的应用注意事项
(1)UAA4002除在前面2条中所介绍的保护功能外,它的内部还集成有自身工作正电源电压Vcc监控功能,当Vcc小于7V时,UAA4002内部的逻辑处理器可保证其不输出正向驱动信号,且这一电压阀值是不可调的。
(2)UAA4002内部还集成有自身极度过热保护功能,一旦UAA4002芯片的温度超过150℃,则UAA4002便自动切断输出脉冲,一旦芯片温度降低到极限温度以下,输出驱动脉冲就又重新出现。这一功能可用来防止UAA4002输出因任何原因对地短路而造成的芯片损坏。
(3)UAA4002应用中必须正确配线。合理的布线应以功率晶体管的发射极作为中心接地点,且在UAA4002的各保护门槛设置电阻两端并联去耦电容、UAA4002自身工作电源对地及UAA4002输出的16脚与地之间并联必要的去耦电容,且去耦电容必须是低电感量和低串联电阻值的高质量电容,该电容以无感卷绕的聚丙烯或聚乙烯电容为最好,这个合理的布线可以用图12-27来说明。

(4)坚持tonmin运行状态的克服:有时应用UAA4002于开关电路中时,由于电路中干扰等因素的存在,会引起UAA4002的诸多保护中的某一个动作,这表现在UAA4002坚持toumin工作,即总输出最小脉宽,为了排除干扰,需寻找干扰源,这就要求逐个地将保护功能删除,直到获得了被驱动的晶体管的正常导通时,此时删除的保护功能便是受到干扰而引起误动作的那一个。
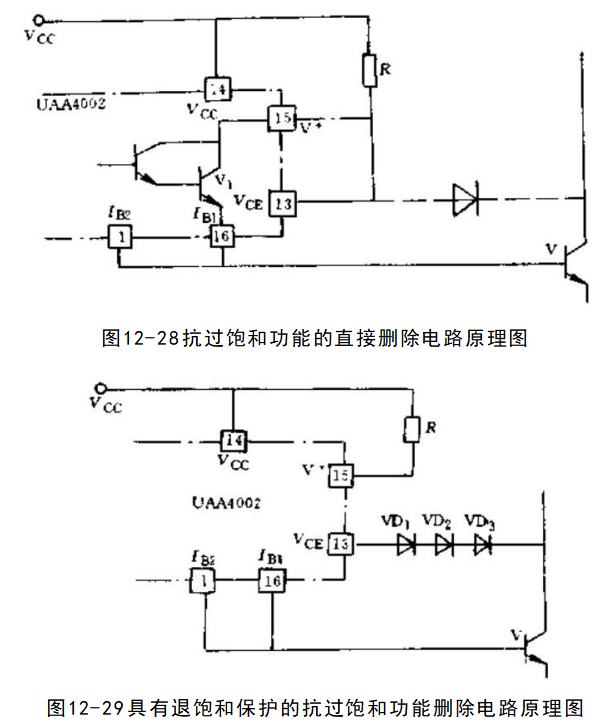
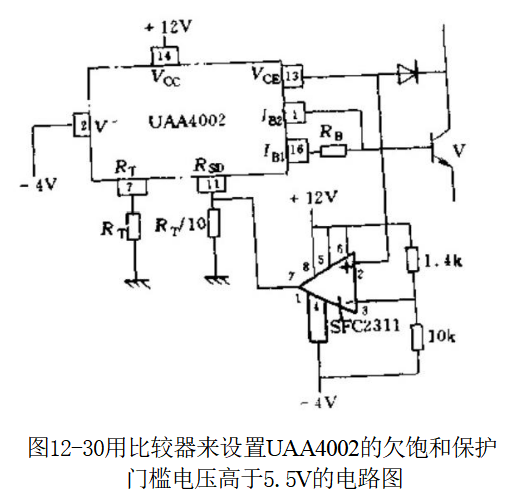
(5)抗过饱和器件的删除:UAA4002的常规应用中,开关晶体管(被驱动的开关晶体管)的基极电流是自动调节的,被驱动的功率晶体管处于临界饱和状态,但当被驱动的晶体管的工作频率很低时,开关损耗微不足道,此时主要损耗是低导通损耗,因而可人为地剧除抗过饱和网络,使被驱动的功率晶体管运行于过饱和状态。实现此目的的方法有两个:一是把UAA4002VcE管脚与被驱动的功率晶体管集电极的二极管断开,并直接把Vce管脚与V+管脚相连后通过一电阻接Vc(见图12-28),此种处理方法的缺点是在被驱动晶体管退饱和以后不能进行快速有效的保护,图12-29给出了删除抗过饱和网络又保留退饱和保护功能的连接图。图中给二极管VD₃串联连接了两个二极管VD₁和VD₂,UAA4002产生的电流由电阻R确定,集射极电压仍被监控,尽管UAA4002管脚VcE端与被驱动的晶体管集电极之间的压差等于三个二极管的电压阙值,但由于被驱动的晶体管工作于过饱和状态,这不会引起被驱动的晶体管退饱和后保护不了的问题,
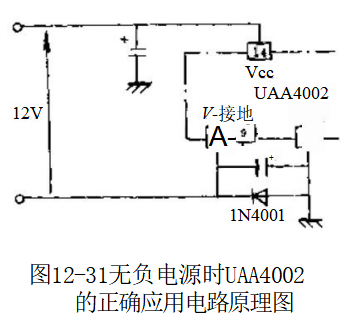
(6)电压阈值超过5.5V的退饱和保护电路:实际应用中,当UAA4002用来驱动多级达林顿晶体管时,正常工作情况下,被驱动的功率晶体管的集射极饱和电压有可能大于5.5V,此时若直接应用UAA4002的Rsp端(11脚)来设置欠饱和保护门槛电压,便无法使被驱动的功率晶体管正常工作,其原因在于此时要求Rsp端的等效门槛电压高于5.5V,图12-30给出了设计等效门槛电压为10V的一种方案,图中检测的门槛电压在LM339比较器的反向输人端设置,在图示参数下,该等效欠饱和保护门槛电压为10V.只要引脚VcE上的电压低于10V,则比较器的输出便为低电平,引脚Rso上的电压近似为-4V,退饱和保护功能被删除,一但VcE上的电压超过10V,比较器输出即改变状态,退饱和保护功能动作,故障被检测。
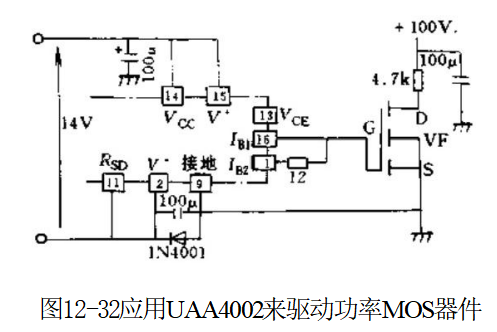
(7)无负电源情况下UAA4002的应用:在有些应用场合下,用户的基极驱动电路的供电电源为单电源,此时可用图12-31的电路保证UAA4002正常工作的适当负偏压,若一个二极管的压降不足以使UAA4002正常偏置的话,可考虑两个或三个二极管串联。
(8)应用UAA4002来驱动功率场效应晶体管(MOSFET)或绝缘栅双极晶体管(IGBT)UAA4002的独特设计使它非常适用于驱动功率MOS门器件,如功率MOSFET或IGBT,图12-32给出了应用UAA4002来驱动功率IGBT的原理电路图。UAA4002的正输出端直接接到IGBT删极,使其快速进入通态,而它的负输出驱动信号用来使功率IGBT的删极电容迅速放电,从而控制功率IGBT快速关断,由于UAA4002的输出电流足以快速地控制输入电容为几纳法的器件,所以它特别适用于控制若干个并联的MOS门功率器件(如MOSFET、IGBT等)。
5.UAA4002应用举例UAA4002的独特设计,使其可方便地用于主功率器件为功率晶体管的开关电源、斩波器、中频电源、交流调速、直流调速、DC/DC变流器等电力电子设备中,限于篇幅仅举几例说明其应用。
(1)UAA4002与HEF4752V相结合,在交流电动机变频调速系统中应用:图12-33给出了由UAA4002与8031单片机及HEF4752V专用三相SPWM脉冲形成电路相结合构成的三相晶体管全桥SPWM逆变器系统的简化原理图。该系统可用于三相工频及中频电动机的变频调速中。图12-33中8031的P₁口设置为
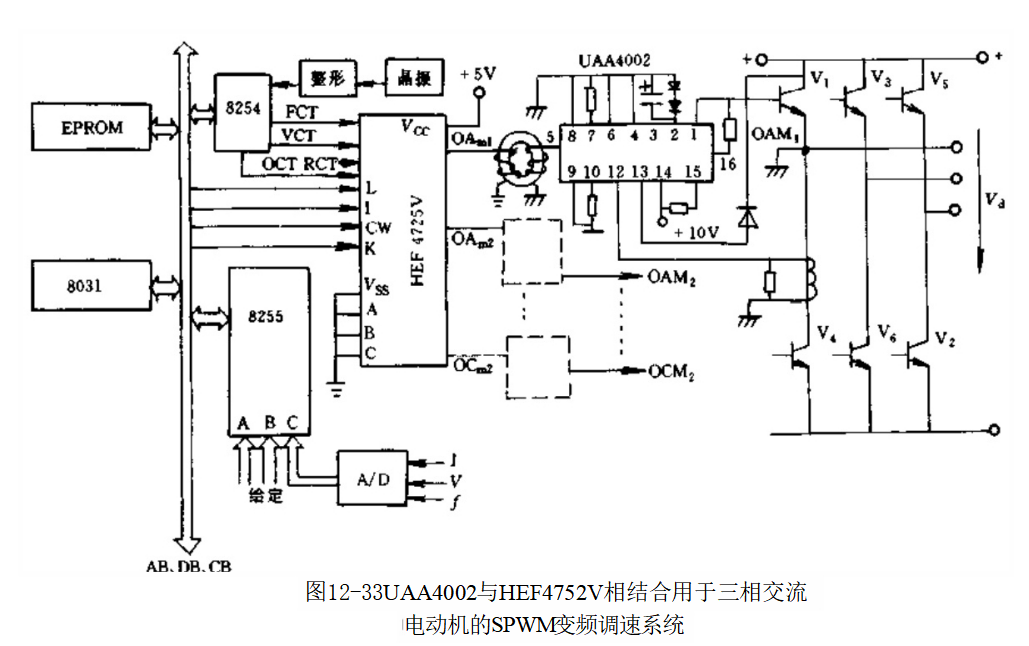
位控工作方式,用来控制HEF4752V所需要的输入信号I、L、K、CW。整个系统的控制程序存放在EPROM中,用户要求的控制状态及频率给定分别经8255可编程输入输出接口的A口和B口送入微机,由8031的CPU经过运算、判断转化为相应的时间常数送入8254可编程计数器,经8254计数分频后给HEF4752V提供其所需要的四路时钟输入。这里单片机完成的工作为:启动、停止HEF4752V的工作、改变HEF4752V的输出脉冲相序、过电流保护、过电压保护、显示、低频补偿、频率给定、时间常数的转换及有关闭环调节等,而UAA4002用来对HEF4752V输出的脉冲进行功率放大,完成对晶体管的最优基极驱动,其负电源由阳极接到脉冲变压器二次侧的地,而阴极由接到UAA4002引脚的两个相串联的二极管上的压降来提供,此种结构省去了通常需要的负电源。上述结构决定了晶体管基极驱动信号的调频范围为4~71.3Hz(在正弦调制条件下),且具有较高的频率分辨率。
(2)在直流电动机的PWM调速系统中应用:直流电动机的PWM调速在位置伺服系统、机器人系统等领域得到了广泛的应用,如果在这些系统中用UAA4002来代替分立器件或其他电路构成的基极驱动电路来驱动功率晶体管,将会极大地简化基极驱动电路的设计,提高基极驱动电路的集成度、可靠性、快速性、稳定性及抗干扰性,图12-34给出了UAA4002用于直流电动机PWM调速系统中的简化原理图。图中,四片UAA4002均设置为
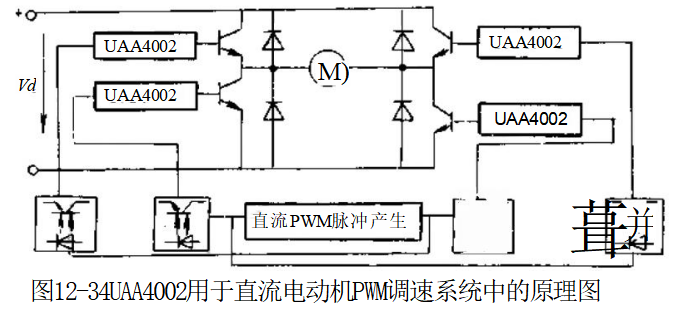
脉冲工作模式,且采用光隔离器作为主电路与脉冲形成部分的隔离器件。随着主电路中所用功率晶体管的不同,该系统可用来驱动功率为几百瓦~几十千瓦的直流电动机。
随便看看
- 2024-11-18液压泵电镀修复法
- 2024-11-27我国液压技术简介
- 2024-09-19溢流阀-液压传动基础知识
- 2024-11-21柱塞圆柱表面咬毛、拉仿甚至咬死
- 2024-11-11供油与发动机转速范围之间的关系