
坐标系的结合

对于一个物体,常常要根据不同目的设定多个坐标系。在图5.23所示的积木中,除代表积木位置和姿势的block坐标系之外,还设定了指定抓取位置的block-gras
数据型式
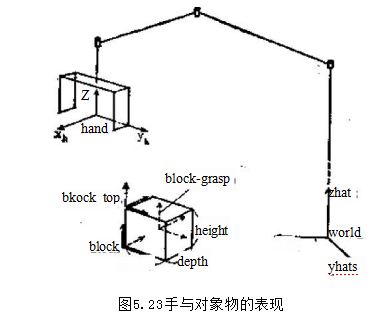
与AL一样,ASRL也是用被固定在对象上的多个直角坐标系及其相互关系来统一描述由机器人及对象物所组成的作业环境。图5.23是被设定在作业环境中的坐标系举例。wo
机器人语言
机器人的特征之一是通用性,为了让其具有通用性,机器人作为可编程机械系统而构成。通过执行种种程序,让其完成各种各样的作业。到前节为止,我们决定了机器人基本机能的集
根据视觉的零部件分类
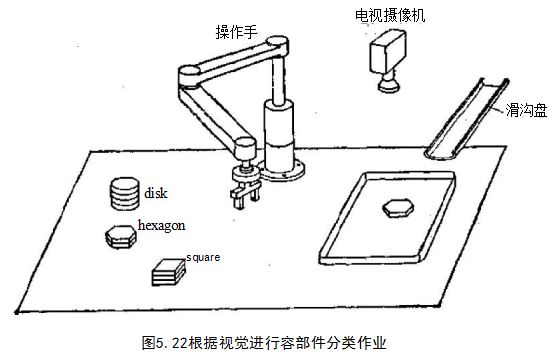
我们来编写执行下述作业的程序(图5.22),从滑沟盘,将圆形、正方形、六角形这三种板一个个随机地送进托盘。将落到盘内的板区分为圆板、正方板、六角板三类,并分别叠
曲柄的回转
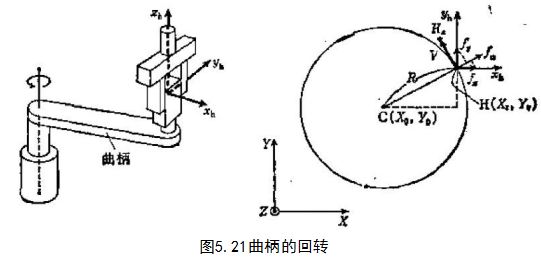
回转曲柄对人来讲是最简单的。但对于机器人却是极为困难的动作之一。曲柄是沿着空间所确定的圆轨道运动的,如果让机器人必须按这个约束条件不断回转曲柄,则是困难的,位置