
作业环境与零部件的描述
装配作业的程序,由描述装配动作顺序的部分,和在那里定义处理的零部件及环境数据部分所构成,正如在5.5节中所叙述的那样,在机器人语言ASRL中,物体的位置和姿势,
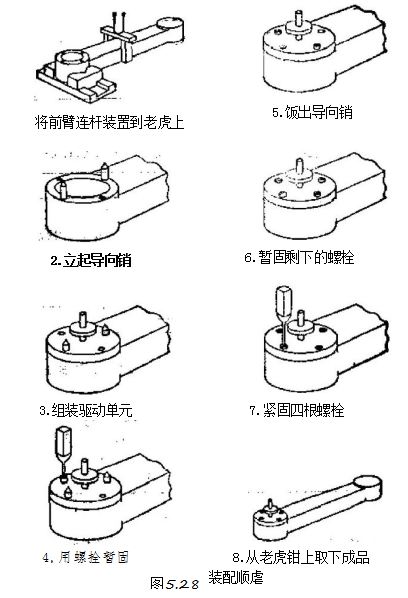
装配作业的程序
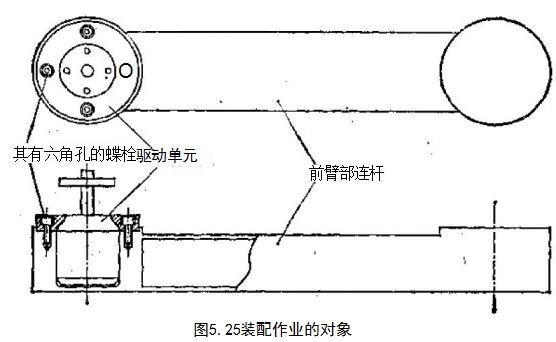
图5.25是它的装配图;零部件是成为臂的前臂部构造的连杆和驱动单元,及四根螺栓,驱动单元是将电机、齿轮、编码器一体化后,控制假想臂的手腕部回转的单元。下面我们来
宏功能

所谓宏功能,是按照定义,进行文本换写的编程方法。事先把频繁使用的典型动作作为宏功能定义,在简洁地整理源程序后进行描述时,可以起很大作用。下面我们给出宏功能定义的
程序的控制构造
程序采用由begin和end联结成的块状构造,从而被构造化,作为为了组合控制构造的语法,备有IF语句,FOR语句,WHILE语句,CASE*语句。关于这些语句,
动作语句
用来移动机器入的MOVE语句,其基本形式如下:MOVEframeTOdestination;其中,frame是被控制的坐标系,是表示手或物体的COORDIN-A