
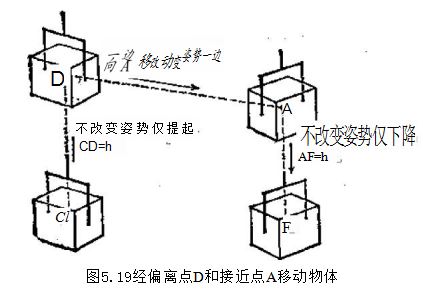
放置物体的动作(力觉的利用)

在人将某物体放置到其它物体上时,当被手抓着的物体到达应该放置的地方之后,手就会无意识地离开。除了相当复杂的放置方法以外,一般是不让物体“扑通”一下落下的,也不必
抓取物体的动作(触觉的利用)
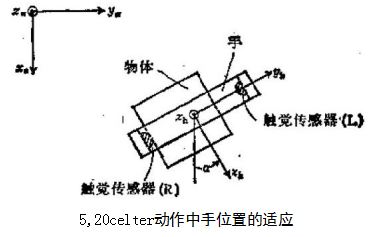
假想机器人同时闭合两指来抓取物体。机器人抓取物体时,我们希望机器人不要碰动那个物体,稳稳地抓起,若机器人的位置决定的准确,物体被放置的位置也能正确指示的话,则机
动作轨道的控制
我们考虑一下机器人的手沿着作业空间内设定的折线轨道进行运动的情况,首先,用直线将作业空间内的2点联接,为了沿该轨道运动,我们来考虑目标值插补法。设C点(x.,y
功能集的执行
由操作手控制系统、视觉系统、触觉、力觉等各子系统的专用CPU来执行的。各个功能都是为了执行由该子系统所指定的机器人基本功能的命令,从并行过程监控来看,功能集占有
监控

在并行过程中,看来多数过程是一边公用有限的计算资源(CPU,数据区域,装置等),一边同时运行。即使在多数并行运行的多个过程之间,有相互排除或同步等于涉时,也不会